#include <TinyGPSPlus.h>
#include <SoftwareSerial.h>
//static const int gpsRXPin = 0, gpsTXPin = 1; //GPS on Port D0
//static const int gpsRXPin = 1, gpsTXPin = 2; //GPS on Port D1
//static const int gpsRXPin = 2, gpsTXPin = 3; //GPS on Port D2
//static const int gpsRXPin = 5, gpsTXPin = 4; //GPS on Port D5/IIC (Pins Reversed)
//static const int gpsRXPin = 7, gpsTXPin = 6; //GPS on Port D7/UART (Pins Reversed)
//static const int gpsRXPin = 8, gpsTXPin = 9; //GPS on Port D8
static const int gpsRXPin = 9, gpsTXPin = 10; //GPS on Port D9
static const uint32_t gpsBaud = 9600;
static const uint32_t smonBaud = 9600;
// The TinyGPSPlus object
TinyGPSPlus gps;
// The serial connection to the GPS device
SoftwareSerial gps_Serial(gpsRXPin, gpsTXPin);
void setup()
{
Serial.begin(smonBaud);
while (!Serial)
{//Begin while()
Serial.println("\nSerial Setup..."); // wait for serial port to connect.
}// End while()
gps_Serial.begin(gpsBaud);
Serial.println("FullExample.ino");
Serial.println("An extensive example of many interesting TinyGPSPlus features");
Serial.print("Testing TinyGPSPlus library v. ");
Serial.println(TinyGPSPlus::libraryVersion());
Serial.println("by Mikal Hart");
Serial.println();
Serial.println("Sats HDOP Latitude Longitude Fix Date Time Date Alt Course Speed Card Distance Course Card Chars Sentences Checksum");
Serial.println(" (deg) (deg) Age Age (m) --- from GPS ---- ---- to London ---- RX RX Fail");
Serial.println("----------------------------------------------------------------------------------------------------------------------------------------");
}
void loop()
{
static const double LONDON_LAT = 51.508131, LONDON_LON = -0.128002;
printInt(gps.satellites.value(), gps.satellites.isValid(), 5);
printFloat(gps.hdop.hdop(), gps.hdop.isValid(), 6, 1);
printFloat(gps.location.lat(), gps.location.isValid(), 11, 6);
printFloat(gps.location.lng(), gps.location.isValid(), 12, 6);
printInt(gps.location.age(), gps.location.isValid(), 5);
printDateTime(gps.date, gps.time);
printFloat(gps.altitude.meters(), gps.altitude.isValid(), 7, 2);
printFloat(gps.course.deg(), gps.course.isValid(), 7, 2);
printFloat(gps.speed.kmph(), gps.speed.isValid(), 6, 2);
printStr(gps.course.isValid() ? TinyGPSPlus::cardinal(gps.course.deg()) : "*** ", 6);
unsigned long distanceKmToLondon =
(unsigned long)TinyGPSPlus::distanceBetween(
gps.location.lat(),
gps.location.lng(),
LONDON_LAT,
LONDON_LON) / 1000;
printInt(distanceKmToLondon, gps.location.isValid(), 9);
double courseToLondon =
TinyGPSPlus::courseTo(
gps.location.lat(),
gps.location.lng(),
LONDON_LAT,
LONDON_LON);
printFloat(courseToLondon, gps.location.isValid(), 7, 2);
const char *cardinalToLondon = TinyGPSPlus::cardinal(courseToLondon);
printStr(gps.location.isValid() ? cardinalToLondon : "*** ", 6);
printInt(gps.charsProcessed(), true, 6);
printInt(gps.sentencesWithFix(), true, 10);
printInt(gps.failedChecksum(), true, 9);
Serial.println();
smartDelay(1000);
if (millis() > 5000 && gps.charsProcessed() < 10)
Serial.println(F("No GPS data received: check wiring"));
}
// This custom version of delay() ensures that the gps object
// is being "fed".
static void smartDelay(unsigned long ms)
{
unsigned long start = millis();
do
{
while (gps_Serial.available())
gps.encode(gps_Serial.read());
} while (millis() - start < ms);
}
static void printFloat(float val, bool valid, int len, int prec)
{
if (!valid)
{
while (len-- > 1)
Serial.print('*');
Serial.print(' ');
}
else
{
Serial.print(val, prec);
int vi = abs((int)val);
int flen = prec + (val < 0.0 ? 2 : 1); // . and -
flen += vi >= 1000 ? 4 : vi >= 100 ? 3 : vi >= 10 ? 2 : 1;
for (int i=flen; i<len; ++i)
Serial.print(' ');
}
smartDelay(0);
}
static void printInt(unsigned long val, bool valid, int len)
{
char sz[32] = "*****************";
if (valid)
sprintf(sz, "%ld", val);
sz[len] = 0;
for (int i=strlen(sz); i<len; ++i)
sz[i] = ' ';
if (len > 0)
sz[len-1] = ' ';
Serial.print(sz);
smartDelay(0);
}
static void printDateTime(TinyGPSDate &d, TinyGPSTime &t)
{
if (!d.isValid())
{
Serial.print(F("********** "));
}
else
{
char sz[32];
sprintf(sz, "%02d/%02d/%02d ", d.month(), d.day(), d.year());
Serial.print(sz);
}
if (!t.isValid())
{
Serial.print(F("******** "));
}
else
{
char sz[32];
sprintf(sz, "%02d:%02d:%02d ", t.hour(), t.minute(), t.second());
Serial.print(sz);
}
printInt(d.age(), d.isValid(), 5);
smartDelay(0);
}
static void printStr(const char *str, int len)
{
int slen = strlen(str);
for (int i=0; i<len; ++i)
Serial.print(i<slen ? str[i] : ' ');
smartDelay(0);
}
FullExample.zip (1.7 KB)
This code is from
TinyGPSPlus-ESP32
and
ESPSoftwareSerial
load from Arduino IDE
All ports run on XIAO Grove Expansion Board with XIAO SAMD
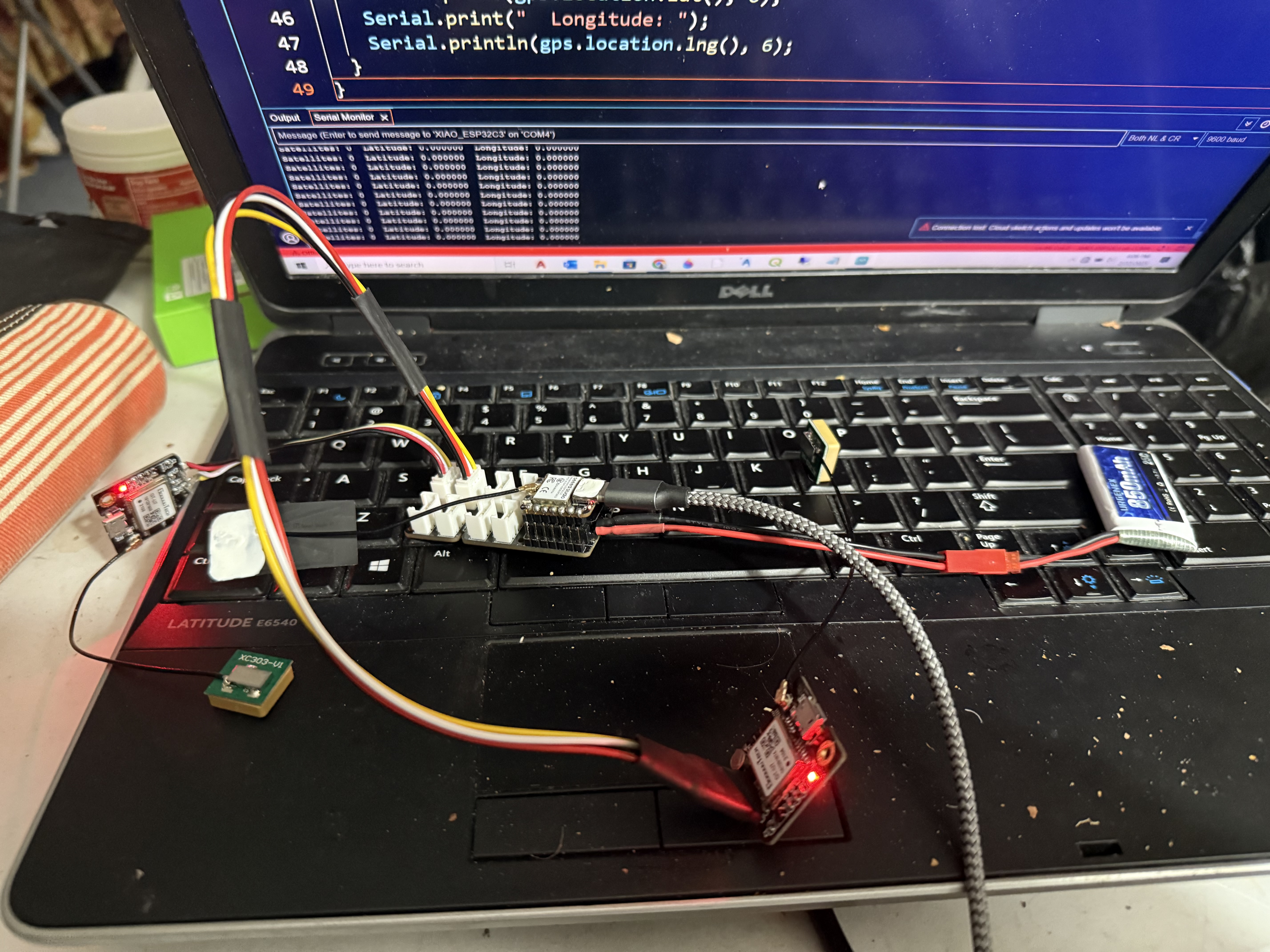
will not run with XIAO ESP32C3