I may be wrong about the absolute wrist tilt function not being usable.
I found a register that reroutes INT2 interrupts to the INT1 pad.
CTRL4_C (13h)
INT2_on_INT1 All interrupt signals available on INT1 pad enable. Default value: 0
(0: interrupt signals divided between INT1 and INT2 pads;
1: all interrupt signals in logic or on INT1 pad)
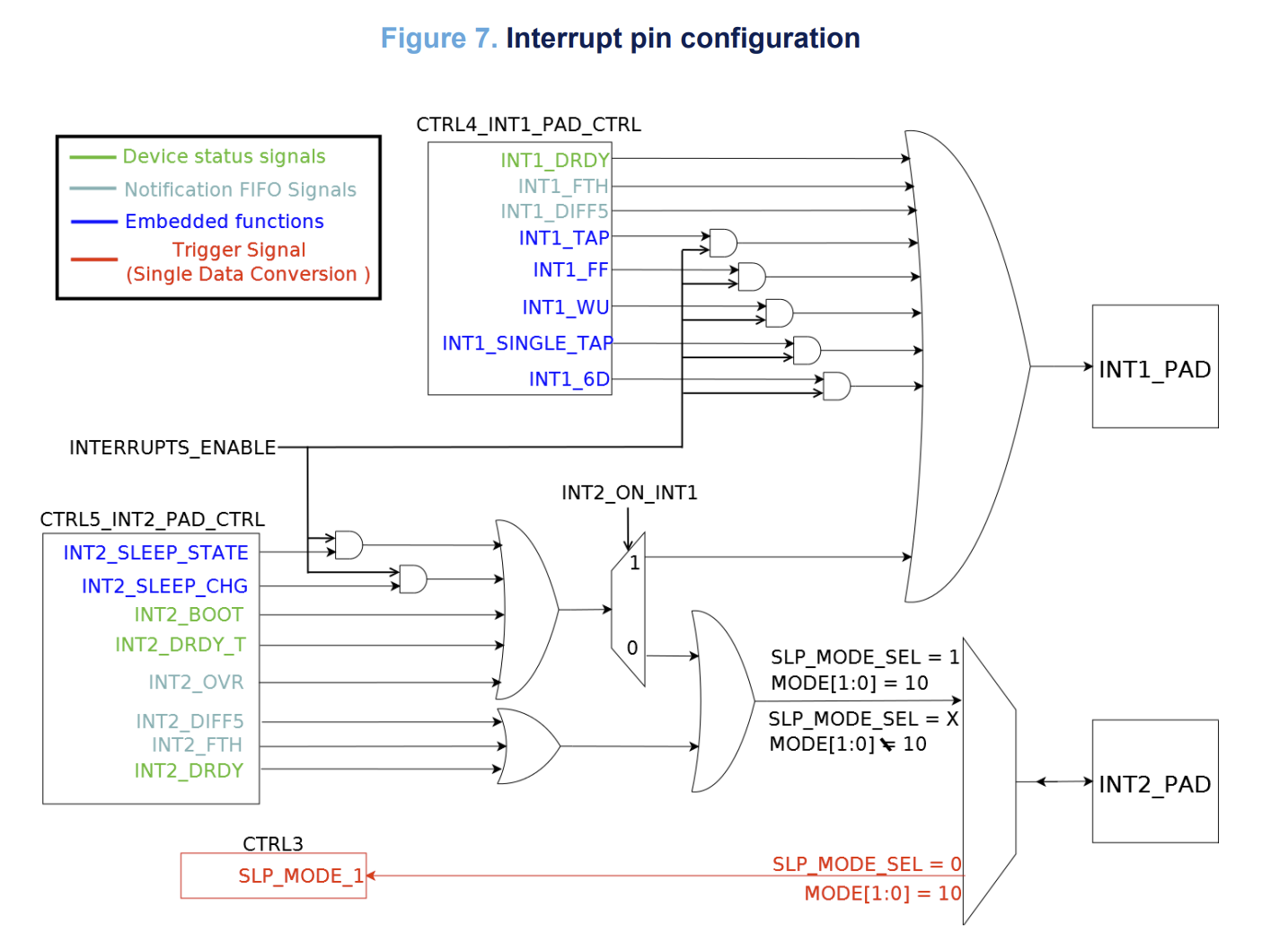
Here is a schematic from another STM accelerometer that roughly shows how it works: