Hi there,
So, I tested and retested and I found some stuff.
XIAO nRF52840 Sense – Sleep Current Investigation
T1) Baseline: ~736–746 μA (SYSTEMOFF confirmed)
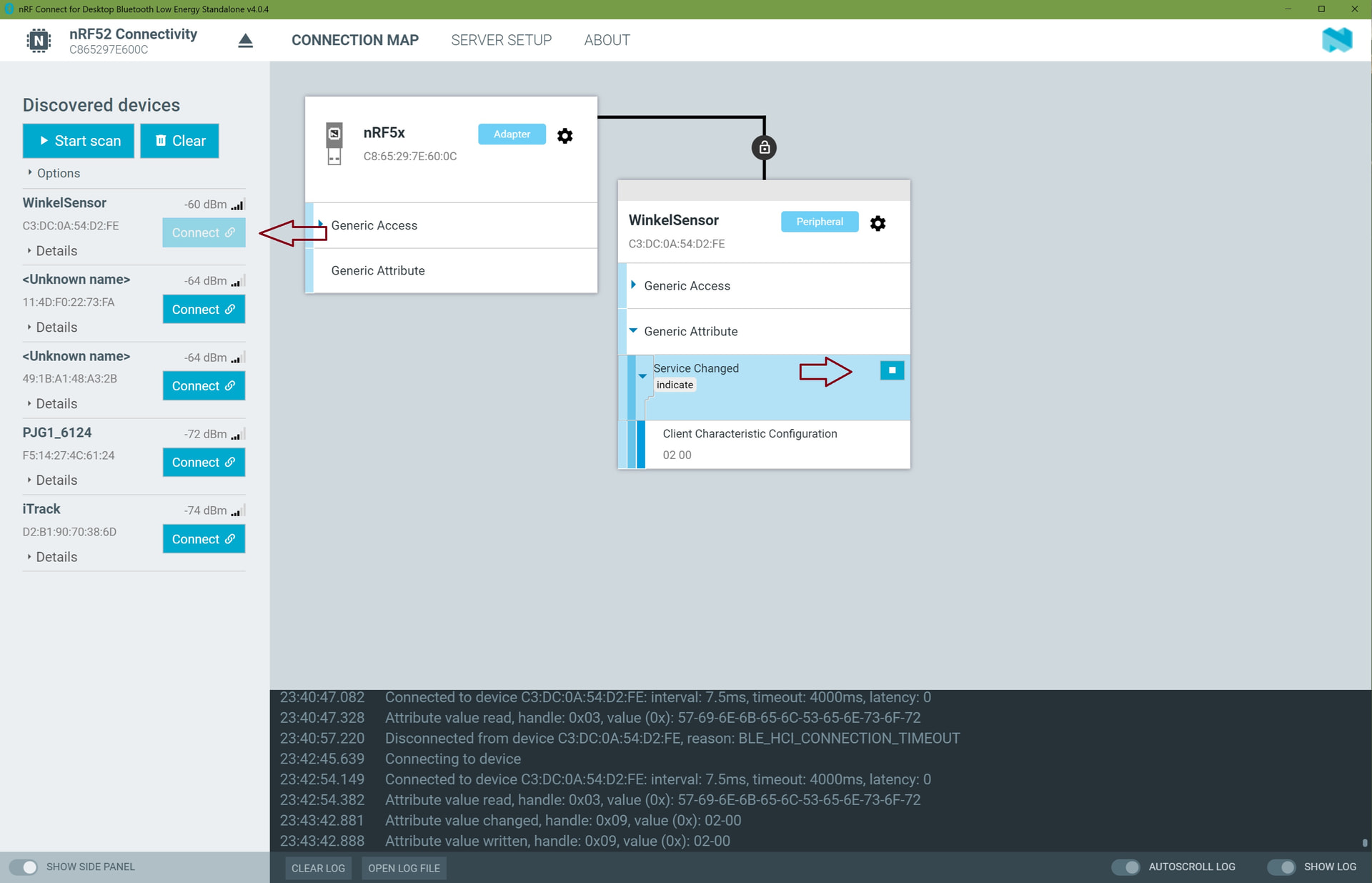
T2) BLE Test: Active 4–8 mA, sleep returns to ~746 μA
T3) GPIO Wake: Returns to ~746 μA
T4) Full App (no IMU): ~746 μA
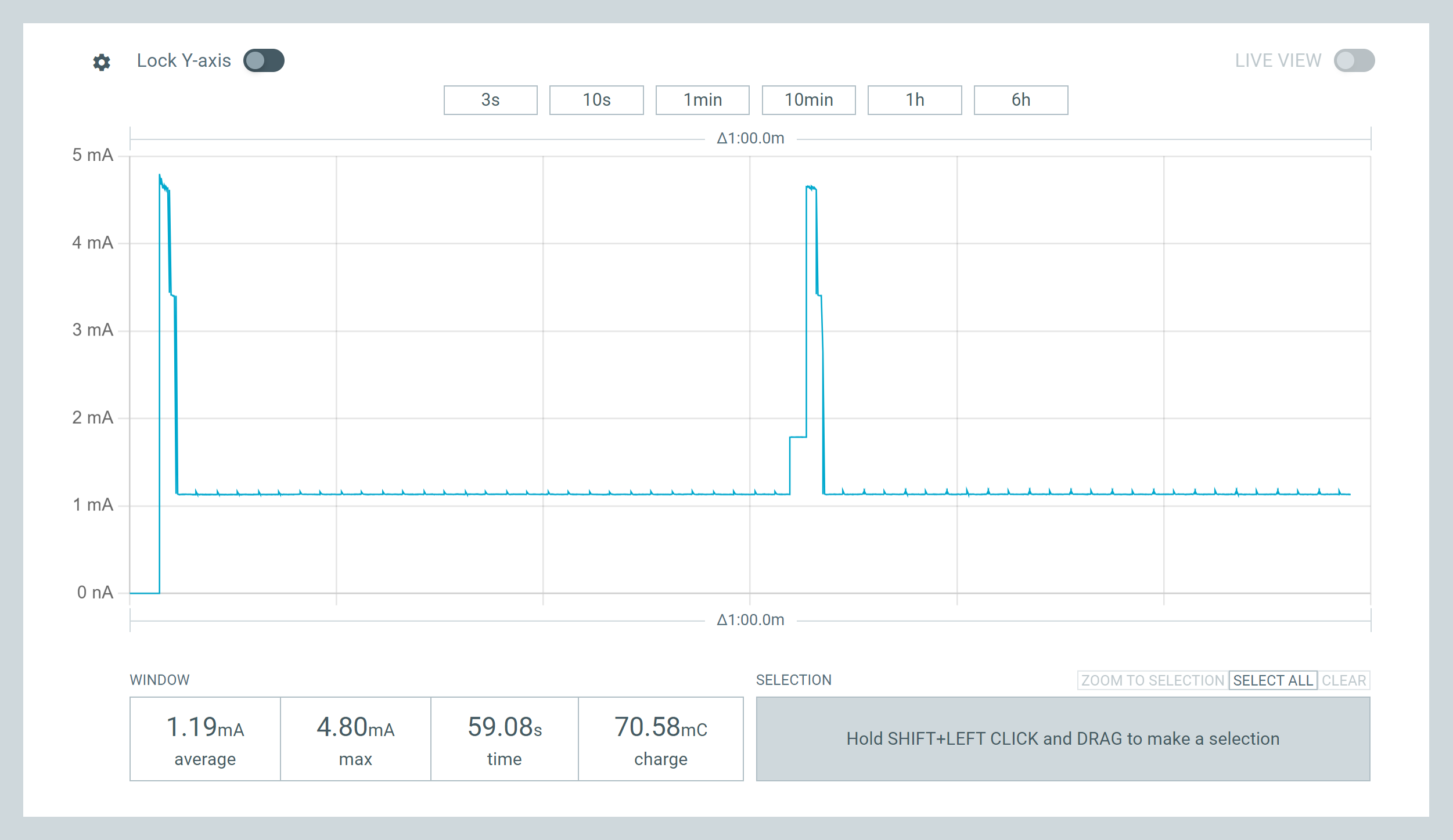
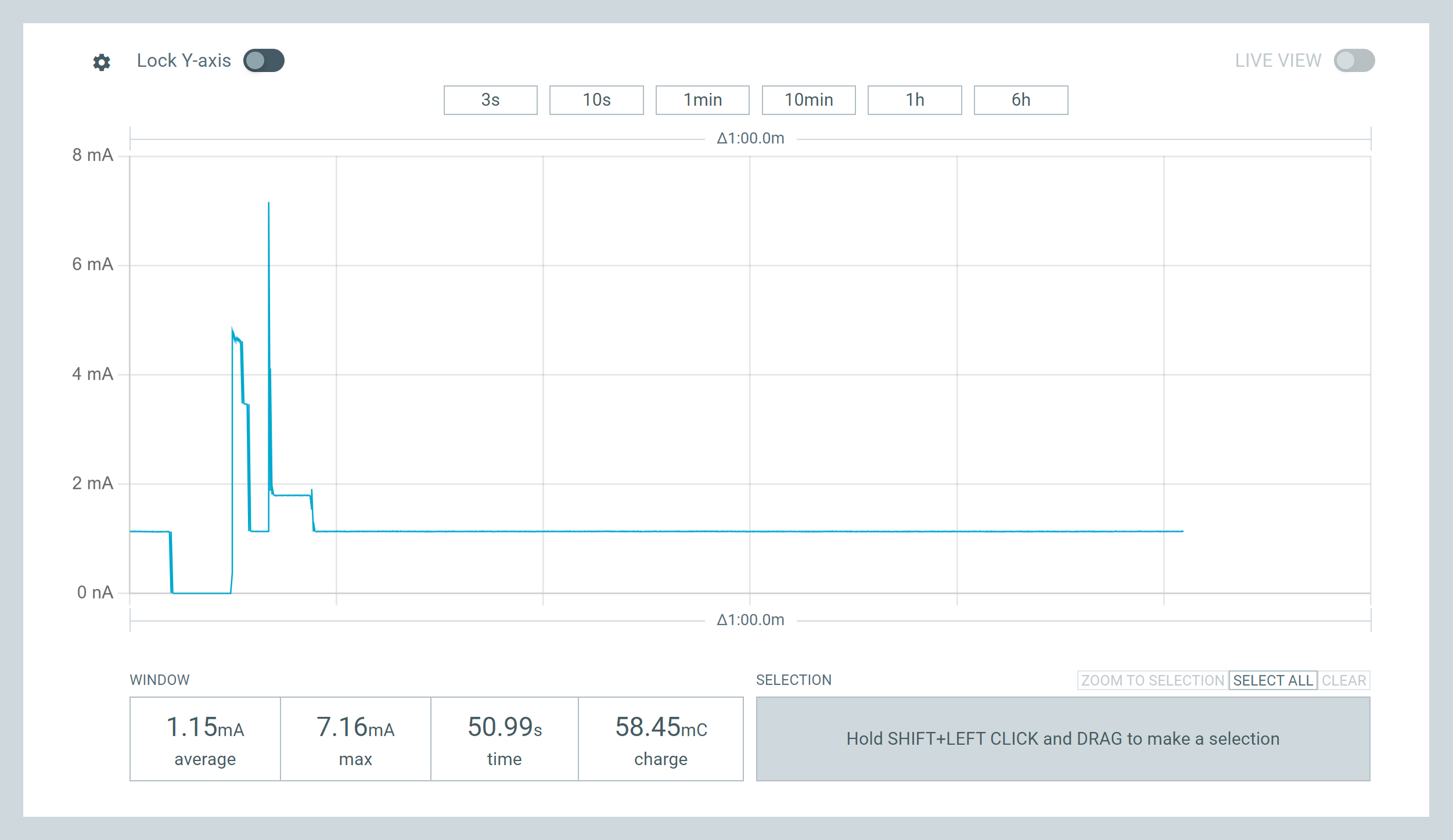
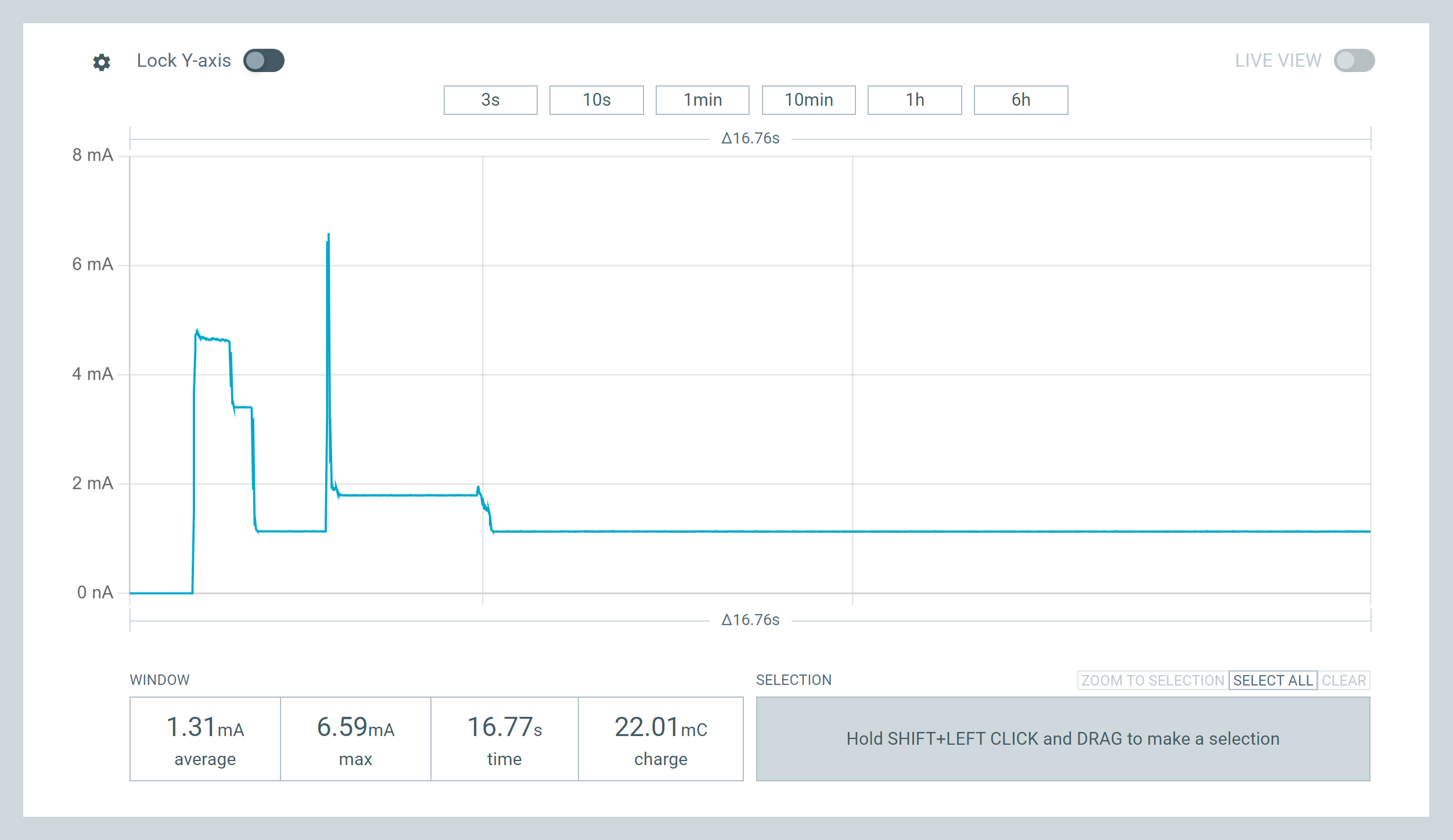
T5) IMU Initialized (no shutdown): ~1.13 mA (+~400 μA increase)
T6) IMU Power Only: ~746 μA (no impact)
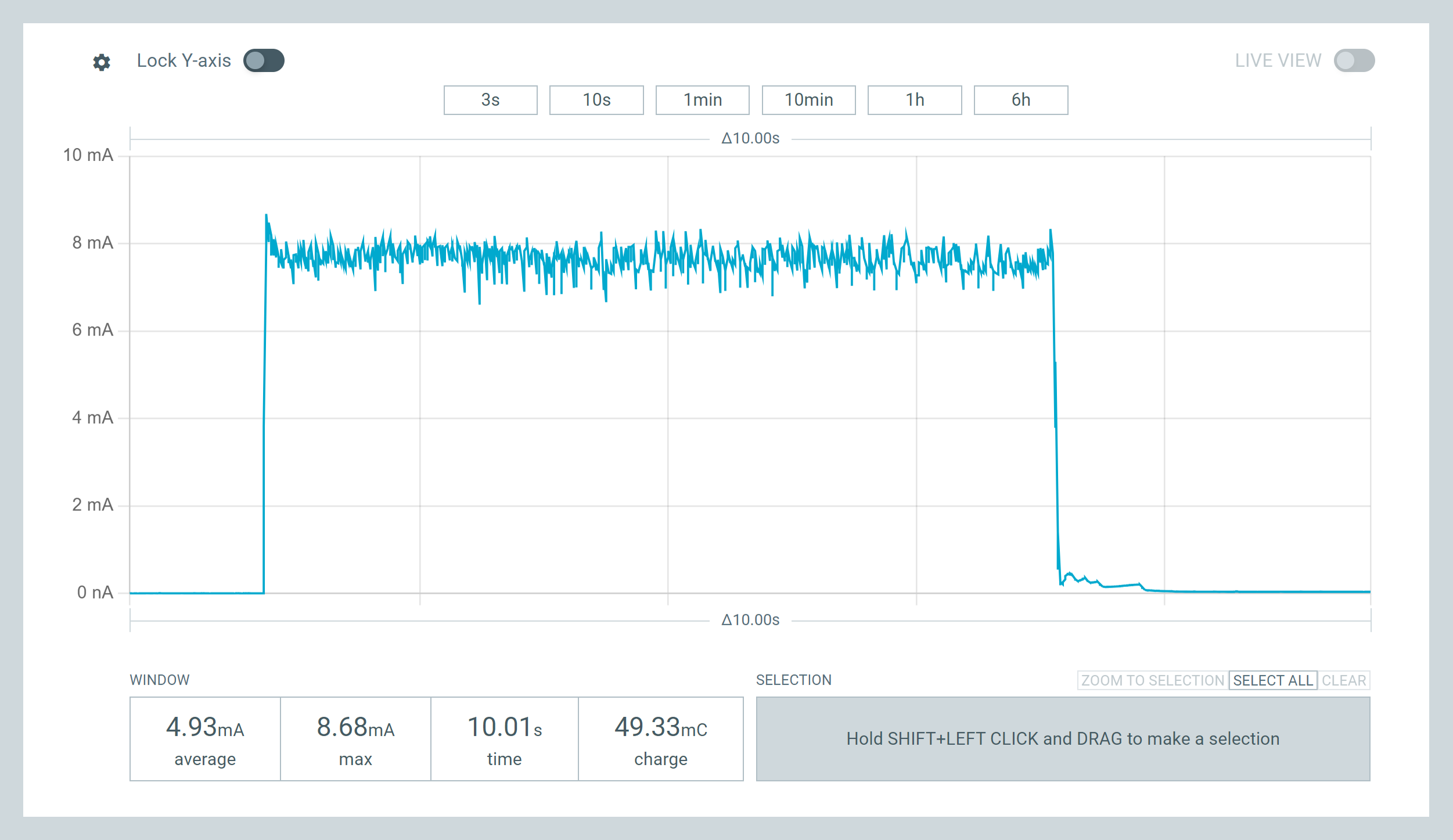
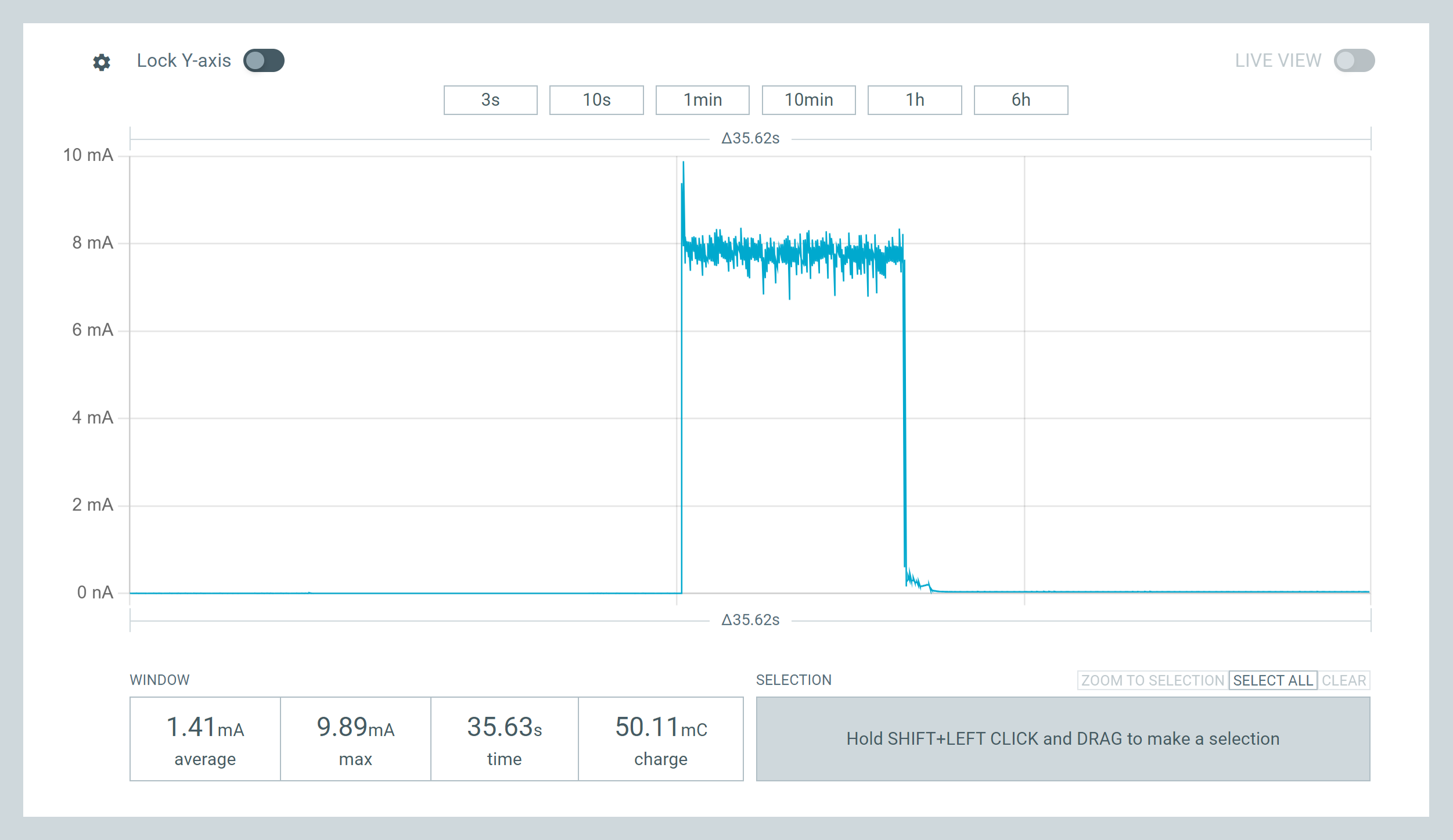
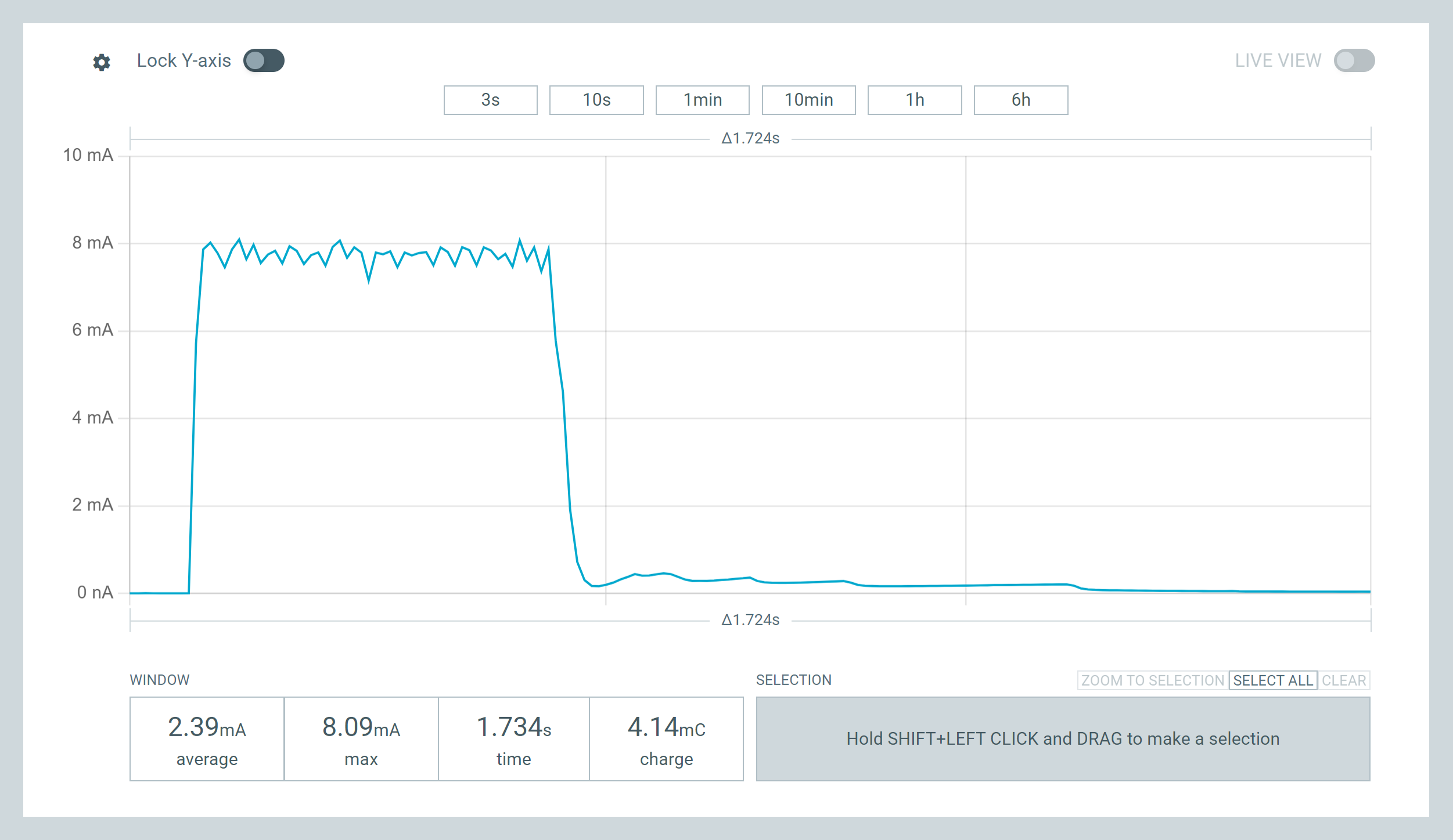
T7) Forced I2C Shutdown: ~10 mA (invalid state, not usable) 

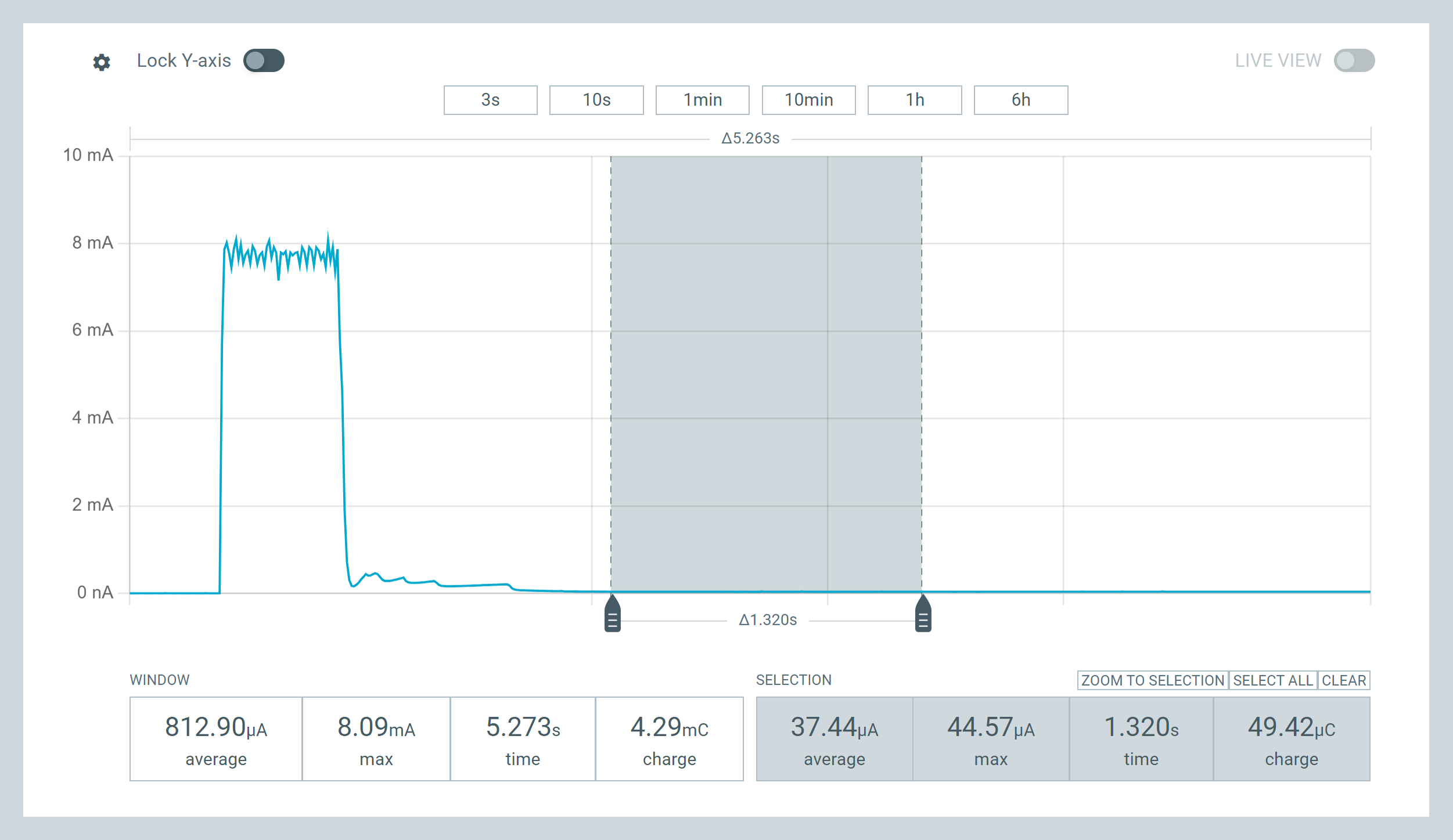
T8) Correct Sequence (IMU standby + power off): ~736 μA (resolved)
Conclusion: IMU must be placed in standby before power removal. I2C lines can back-power the sensor if not properly shut down. Avoid Wire.end() on this BSP. 
Test 1
something is up on this IMU?
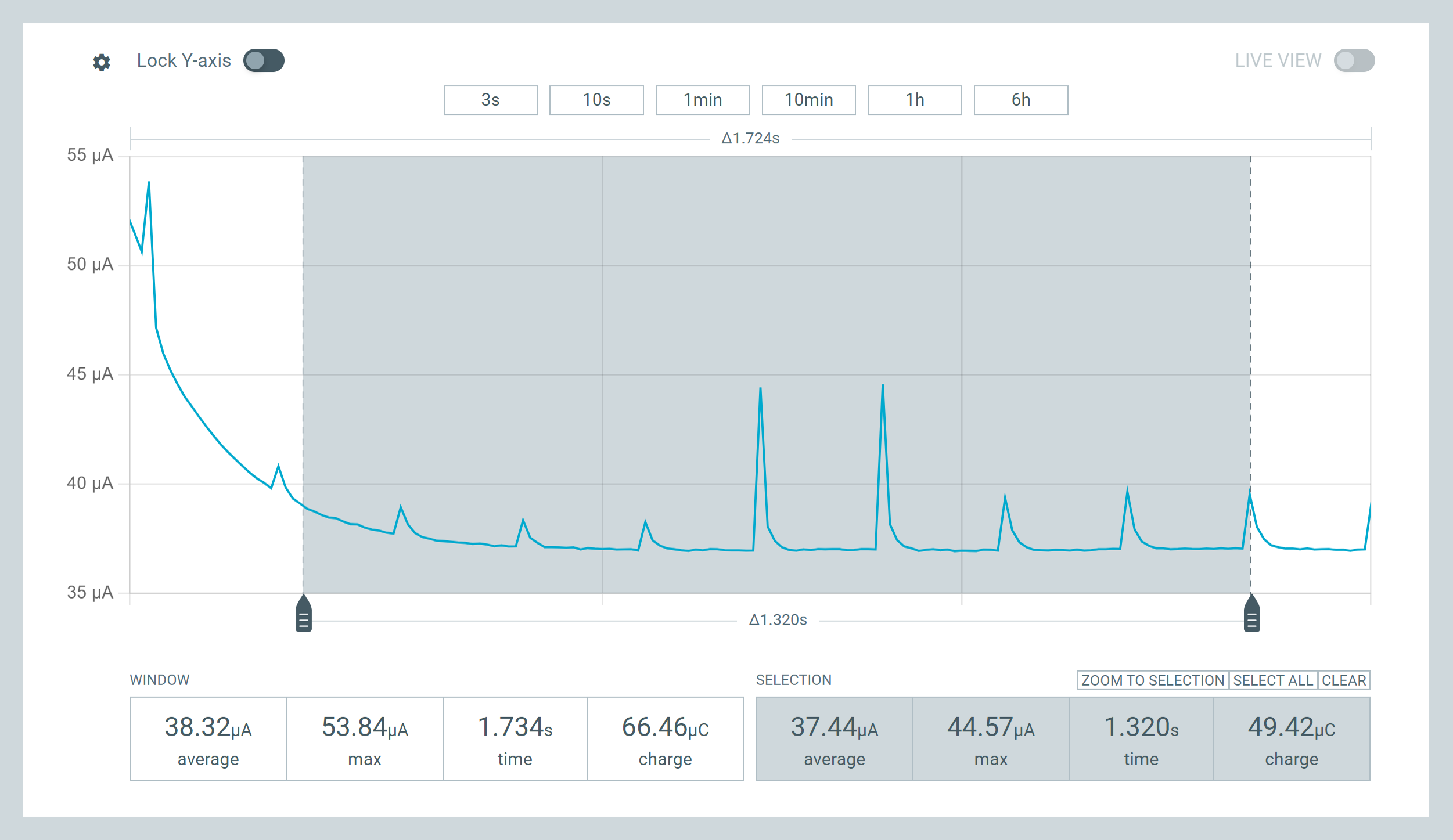
Fixed , getting closer…
/*
* ------------------------------------------------------------------
* Project : WinkelSensor BLE Tilt Beacon
* Target : Seeed XIAO nRF52840 Sense
* BSP : Seeeduino mbed 2.9.x
* IMU : LSM6DS3 over I2C (0x6A) 2.0.4
*
* Function:
* - Reads tilt angle from onboard IMU
* - Advertises angle and battery voltage over BLE
* - Enters SYSTEMOFF on long button press or low battery
* - Supports charge-wait mode when USB is present and battery is low
*
* Low Power Notes:
* - Baseline SYSTEMOFF measured: ~736–746 uA
* - If IMU is initialized but not explicitly shut down,
* sleep current can remain around ~1.13 mA
* - IMU must be placed into standby before power removal
* - Do NOT call Wire.end() for shutdown on this BSP
*
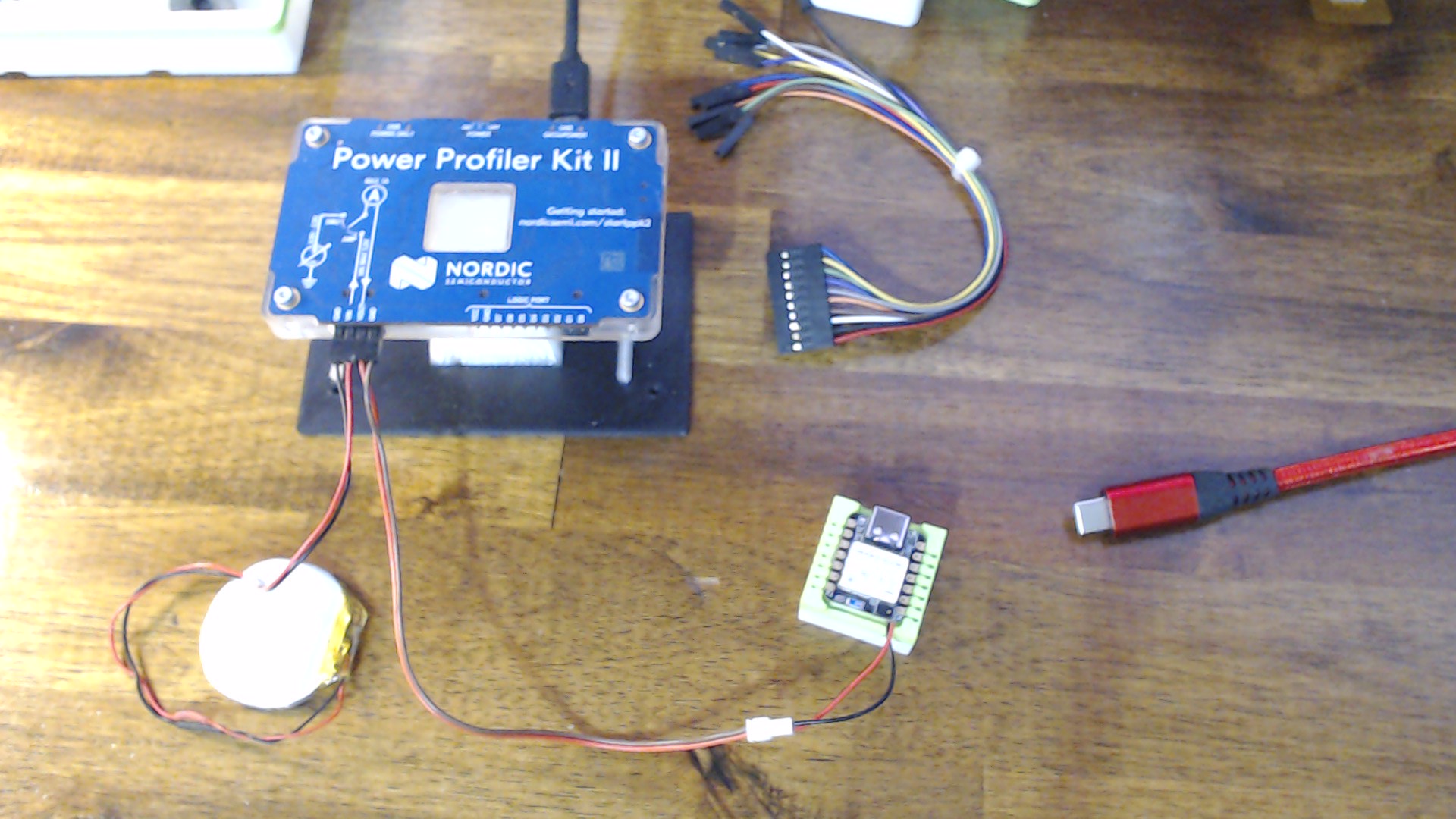
* Verified with Nordic Power Profiler Kit II (PPK2)
* ------------------------------------------------------------------
*/
#include <Arduino.h>
#include <ArduinoBLE.h>
#include <Wire.h>
#include "LSM6DS3.h"
#include <math.h>
#include <nrf_gpio.h>
static const uint8_t SENSOR_ID = 1;
static const uint32_t SEND_MS = 500;
static const uint32_t BATT_MEASURE_MS = 5000;
static const uint32_t CHARGE_WAIT_CHECK_MS = 10000;
static const uint32_t SLEEP_HOLD_MS = 3000;
static const uint16_t LOW_BATT_SLEEP_MV = 3650;
static const uint16_t LOW_BATT_LED_MV = 3730;
static const uint16_t RESUME_BATT_MV = 3800;
// Complementary filter
static const float ALPHA = 0.985f;
static const float SMOOTH_ALPHA = 0.18f;
// 100k / 100k divider => factor 2.0
static const int BAT_PIN = A0;
static const float ADC_REF_V = 3.3f;
static const float BAT_DIVIDER_FACTOR = 2.0f;
static const float BAT_CAL_FACTOR = 1.00f;
static const int ADC_MAX = 4095;
// External LEDs
static const int LED_BLUE_PIN = A1;
static const int LED_RED_PIN = A2;
static const int LED_GREEN_PIN = A3;
// Button: D5 -> button -> GND
static const int BUTTON_PIN = D5;
static const uint8_t FLAG_CHARGING = 0x01;
// LSM6DS3 registers used for standby
static const uint8_t IMU_ADDR = 0x6A;
static const uint8_t REG_CTRL1_XL = 0x10;
static const uint8_t REG_CTRL2_G = 0x11;
LSM6DS3 imu(I2C_MODE, IMU_ADDR);
struct __attribute__((packed)) AdvPacket {
uint8_t magic1;
uint8_t magic2;
uint8_t version;
uint8_t id;
int16_t angle_ddeg;
uint16_t batt_mv;
uint16_t seq;
uint8_t flags;
};
enum SensorMode {
MODE_NORMAL = 0,
MODE_CHARGE_WAIT = 1
};
static SensorMode currentMode = MODE_NORMAL;
static uint16_t seqNo = 0;
static uint32_t nextSendMs = 0;
static uint32_t nextBattMs = 0;
static uint32_t nextChargeCheckMs = 0;
static uint32_t lastFilterUs = 0;
static float pitchDeg = 0.0f;
static float smoothPitchDeg = 0.0f;
static bool filterInitialized = false;
static bool imuReady = false;
static float gyroOffsetY = 0.0f;
static uint16_t batteryMv = 0;
volatile bool buttonPressed = false;
void buttonISR() {
buttonPressed = true;
}
static void blinkInternalLed(uint8_t ledPin, int times, int delayMs) {
pinMode(ledPin, OUTPUT);
for (int i = 0; i < times; i++) {
digitalWrite(ledPin, LOW); // internal RGB is active-low
delay(delayMs);
digitalWrite(ledPin, HIGH);
delay(delayMs);
}
}
static void internalRgbOff() {
pinMode(LED_RED, OUTPUT);
pinMode(LED_GREEN, OUTPUT);
pinMode(LED_BLUE, OUTPUT);
digitalWrite(LED_RED, HIGH);
digitalWrite(LED_GREEN, HIGH);
digitalWrite(LED_BLUE, HIGH);
}
static void parkInternalRgb() {
internalRgbOff();
nrf_gpio_cfg_sense_input(digitalPinToPinName(LED_RED), NRF_GPIO_PIN_PULLUP, NRF_GPIO_PIN_NOSENSE);
nrf_gpio_cfg_sense_input(digitalPinToPinName(LED_GREEN), NRF_GPIO_PIN_PULLUP, NRF_GPIO_PIN_NOSENSE);
nrf_gpio_cfg_sense_input(digitalPinToPinName(LED_BLUE), NRF_GPIO_PIN_PULLUP, NRF_GPIO_PIN_NOSENSE);
}
static void ledsOff() {
digitalWrite(LED_BLUE_PIN, LOW);
digitalWrite(LED_RED_PIN, LOW);
digitalWrite(LED_GREEN_PIN, LOW);
}
static void setLedNormal() {
digitalWrite(LED_BLUE_PIN, LOW);
digitalWrite(LED_RED_PIN, LOW);
digitalWrite(LED_GREEN_PIN, HIGH);
}
static void setLedCharging() {
digitalWrite(LED_BLUE_PIN, HIGH);
digitalWrite(LED_RED_PIN, LOW);
digitalWrite(LED_GREEN_PIN, LOW);
}
static void setLedLowBattery() {
digitalWrite(LED_BLUE_PIN, LOW);
digitalWrite(LED_RED_PIN, HIGH);
digitalWrite(LED_GREEN_PIN, LOW);
}
static void parkBoardPinsForSleep() {
pinMode(LED_BLUE_PIN, INPUT);
pinMode(LED_RED_PIN, INPUT);
pinMode(LED_GREEN_PIN, INPUT);
pinMode(A0, INPUT);
#ifdef PIN_VBAT_ENABLE
pinMode(PIN_VBAT_ENABLE, OUTPUT);
digitalWrite(PIN_VBAT_ENABLE, HIGH);
#endif
#ifdef VBAT_ENABLE
pinMode(VBAT_ENABLE, OUTPUT);
digitalWrite(VBAT_ENABLE, HIGH);
#endif
#ifdef PIN_CHARGING_CURRENT
pinMode(PIN_CHARGING_CURRENT, INPUT);
#endif
#ifdef PIN_LSM6DS3TR_C_POWER
pinMode(PIN_LSM6DS3TR_C_POWER, OUTPUT);
digitalWrite(PIN_LSM6DS3TR_C_POWER, LOW);
#endif
#ifdef PIN_PDM_PWR
pinMode(PIN_PDM_PWR, OUTPUT);
digitalWrite(PIN_PDM_PWR, LOW);
#endif
#ifdef PIN_QSPI_CS
pinMode(PIN_QSPI_CS, INPUT_PULLUP);
#endif
#ifdef PIN_QSPI_SCK
pinMode(PIN_QSPI_SCK, INPUT);
#endif
#ifdef PIN_QSPI_IO0
pinMode(PIN_QSPI_IO0, INPUT);
#endif
#ifdef PIN_QSPI_IO1
pinMode(PIN_QSPI_IO1, INPUT);
#endif
#ifdef PIN_QSPI_IO2
pinMode(PIN_QSPI_IO2, INPUT);
#endif
#ifdef PIN_QSPI_IO3
pinMode(PIN_QSPI_IO3, INPUT);
#endif
}
static float clampPitch(float deg) {
if (deg > 90.0f) return 90.0f;
if (deg < -90.0f) return -90.0f;
return deg;
}
static int16_t degToDdeg(float deg) {
float v = deg * 10.0f;
if (v > 900.0f) v = 900.0f;
if (v < -900.0f) v = -900.0f;
return (int16_t)lroundf(v);
}
static bool usbPresent() {
return (NRF_POWER->USBREGSTATUS & POWER_USBREGSTATUS_VBUSDETECT_Msk) != 0;
}
static uint8_t makeFlags(bool charging) {
uint8_t f = 0;
if (charging) f |= FLAG_CHARGING;
return f;
}
static uint16_t measureBatteryMv() {
const int samples = 32;
uint32_t sum = 0;
analogRead(BAT_PIN);
delay(2);
for (int i = 0; i < samples; i++) {
sum += analogRead(BAT_PIN);
delay(2);
}
float raw = sum / float(samples);
float vAdc = (raw * ADC_REF_V) / ADC_MAX;
float vBat = vAdc * BAT_DIVIDER_FACTOR * BAT_CAL_FACTOR;
if (vBat < 0.0f) vBat = 0.0f;
return (uint16_t)lroundf(vBat * 1000.0f);
}
static float readAccelPitchDeg() {
float ax = imu.readFloatAccelX();
float ay = imu.readFloatAccelY();
float az = imu.readFloatAccelZ();
float accPitch = atan2f(ax, sqrtf(ay * ay + az * az)) * 180.0f / PI;
return clampPitch(accPitch);
}
static void calibrateGyro() {
const int samples = 500;
float sum = 0.0f;
for (int i = 0; i < samples; i++) {
sum += imu.readFloatGyroY();
delay(2);
}
gyroOffsetY = sum / samples;
}
static bool initImuIfNeeded() {
if (imuReady) return true;
#ifdef PIN_LSM6DS3TR_C_POWER
pinMode(PIN_LSM6DS3TR_C_POWER, OUTPUT);
digitalWrite(PIN_LSM6DS3TR_C_POWER, HIGH);
delay(10);
#endif
if (imu.begin() != 0) {
Serial.println("IMU init failed");
return false;
}
Serial.println("Keep sensor still for gyro calibration...");
delay(1000);
calibrateGyro();
pitchDeg = readAccelPitchDeg();
smoothPitchDeg = pitchDeg;
lastFilterUs = micros();
filterInitialized = true;
imuReady = true;
return true;
}
static void updatePitchFilter() {
uint32_t nowUs = micros();
if (!filterInitialized) {
pitchDeg = readAccelPitchDeg();
smoothPitchDeg = pitchDeg;
lastFilterUs = nowUs;
filterInitialized = true;
return;
}
float dt = (nowUs - lastFilterUs) / 1000000.0f;
lastFilterUs = nowUs;
if (dt <= 0.0f || dt > 0.1f) dt = 0.01f;
float gyroY = imu.readFloatGyroY() - gyroOffsetY;
float accelPitch = readAccelPitchDeg();
float gyroPitch = pitchDeg + gyroY * dt;
pitchDeg = ALPHA * gyroPitch + (1.0f - ALPHA) * accelPitch;
pitchDeg = clampPitch(pitchDeg);
smoothPitchDeg += SMOOTH_ALPHA * (pitchDeg - smoothPitchDeg);
smoothPitchDeg = clampPitch(smoothPitchDeg);
}
static void imuStandbyForSleep() {
if (!imuReady) {
return;
}
// Accel OFF
Wire.beginTransmission(IMU_ADDR);
Wire.write(REG_CTRL1_XL);
Wire.write(0x00);
Wire.endTransmission();
delay(5);
// Gyro OFF
Wire.beginTransmission(IMU_ADDR);
Wire.write(REG_CTRL2_G);
Wire.write(0x00);
Wire.endTransmission();
delay(10);
filterInitialized = false;
imuReady = false;
}
static void advertisePacket(int16_t angleDdeg, uint8_t flags) {
AdvPacket p;
p.magic1 = 'W';
p.magic2 = 'H';
p.version = 3;
p.id = SENSOR_ID;
p.angle_ddeg = angleDdeg;
p.batt_mv = batteryMv;
p.seq = seqNo++;
p.flags = flags;
BLE.stopAdvertise();
BLE.setManufacturerData((const uint8_t*)&p, sizeof(p));
BLE.advertise();
}
static void enterTrueSystemOff() {
BLE.stopAdvertise();
delay(20);
detachInterrupt(digitalPinToInterrupt(BUTTON_PIN));
buttonPressed = false;
// Critical low-power fix:
// put IMU into standby BEFORE cutting the sensor rail
imuStandbyForSleep();
delay(20);
ledsOff();
internalRgbOff();
parkInternalRgb();
parkBoardPinsForSleep();
NRF_POWER->DCDCEN = 1;
NRF_POWER->DCDCEN0 = 1;
delay(20);
nrf_gpio_cfg_sense_input(
digitalPinToPinName(BUTTON_PIN),
NRF_GPIO_PIN_PULLUP,
NRF_GPIO_PIN_SENSE_LOW
);
NRF_POWER->SYSTEMOFF = 1;
while (1) {
__WFE();
}
}
static void enterLowBatterySystemOff() {
setLedLowBattery();
delay(300);
enterTrueSystemOff();
}
static bool handleSleepButton() {
if (!buttonPressed) return false;
buttonPressed = false;
unsigned long pressStart = millis();
while (digitalRead(BUTTON_PIN) == LOW && millis() - pressStart < SLEEP_HOLD_MS) {
delay(10);
}
if (digitalRead(BUTTON_PIN) == LOW && millis() - pressStart >= SLEEP_HOLD_MS) {
blinkInternalLed(LED_RED, 2, 120);
while (digitalRead(BUTTON_PIN) == LOW) {
delay(1);
}
delay(50);
enterTrueSystemOff();
return true;
}
return false;
}
static void switchToChargeWait() {
currentMode = MODE_CHARGE_WAIT;
nextChargeCheckMs = millis();
setLedCharging();
}
static void switchToNormal() {
if (!initImuIfNeeded()) return;
currentMode = MODE_NORMAL;
uint32_t now = millis();
nextSendMs = now + SEND_MS;
nextBattMs = now + BATT_MEASURE_MS;
setLedNormal();
advertisePacket(degToDdeg(smoothPitchDeg), makeFlags(usbPresent()));
}
static void evaluatePowerState(bool allowAdvertiseStatus) {
bool usb = usbPresent();
if (!usb && batteryMv <= LOW_BATT_SLEEP_MV) {
enterLowBatterySystemOff();
return;
}
if (usb && batteryMv < RESUME_BATT_MV) {
switchToChargeWait();
if (allowAdvertiseStatus) {
advertisePacket(0, makeFlags(true));
}
return;
}
switchToNormal();
}
void setup() {
Serial.begin(115200);
delay(300);
pinMode(BUTTON_PIN, INPUT_PULLUP);
while (digitalRead(BUTTON_PIN) == LOW) {
delay(1);
}
delay(50);
internalRgbOff();
if (NRF_POWER->RESETREAS & POWER_RESETREAS_OFF_Msk) {
NRF_POWER->RESETREAS = POWER_RESETREAS_OFF_Msk;
blinkInternalLed(LED_BLUE, 2, 120);
}
Wire.begin();
pinMode(BAT_PIN, INPUT);
analogReadResolution(12);
#ifdef PIN_CHARGING_CURRENT
pinMode(PIN_CHARGING_CURRENT, OUTPUT);
digitalWrite(PIN_CHARGING_CURRENT, LOW);
#endif
pinMode(LED_BLUE_PIN, OUTPUT);
pinMode(LED_RED_PIN, OUTPUT);
pinMode(LED_GREEN_PIN, OUTPUT);
ledsOff();
attachInterrupt(digitalPinToInterrupt(BUTTON_PIN), buttonISR, FALLING);
batteryMv = measureBatteryMv();
if (!BLE.begin()) {
setLedLowBattery();
while (1) {
delay(100);
}
}
BLE.setLocalName("WinkelSensor");
BLE.setDeviceName("WinkelSensor");
evaluatePowerState(true);
}
void loop() {
BLE.poll();
if (handleSleepButton()) {
return;
}
if (currentMode == MODE_NORMAL) {
updatePitchFilter();
uint32_t now = millis();
if ((int32_t)(now - nextBattMs) >= 0) {
batteryMv = measureBatteryMv();
nextBattMs = now + BATT_MEASURE_MS;
bool usb = usbPresent();
if ((!usb && batteryMv <= LOW_BATT_SLEEP_MV) || (usb && batteryMv < RESUME_BATT_MV)) {
evaluatePowerState(true);
return;
}
if (!usb && batteryMv <= LOW_BATT_LED_MV) {
setLedLowBattery();
} else {
setLedNormal();
}
}
if ((int32_t)(now - nextSendMs) >= 0) {
advertisePacket(degToDdeg(smoothPitchDeg), makeFlags(usbPresent()));
do {
nextSendMs += SEND_MS;
} while ((int32_t)(now - nextSendMs) >= 0);
}
delay(2);
return;
}
if (currentMode == MODE_CHARGE_WAIT) {
uint32_t now = millis();
if ((int32_t)(now - nextChargeCheckMs) >= 0) {
batteryMv = measureBatteryMv();
nextChargeCheckMs = now + CHARGE_WAIT_CHECK_MS;
bool usb = usbPresent();
if (!usb && batteryMv <= LOW_BATT_SLEEP_MV) {
enterLowBatterySystemOff();
return;
}
if (usb && batteryMv >= RESUME_BATT_MV) {
switchToNormal();
return;
}
setLedCharging();
advertisePacket(0, makeFlags(usb));
}
delay(20);
}
}
I’m getting 43ua. Sleep now…  Don’t wake it.
Don’t wake it. 

Try this code with the FIX and LMK.. 
HTH
GL  PJ
PJ
Sleep_Current_Report_Enhanced.zip (237.0 KB)
also I’m testing a pushbutton wake too, (D5), a little later.