In my previous experiments I had been able to achieve a communication distance of 10 km.
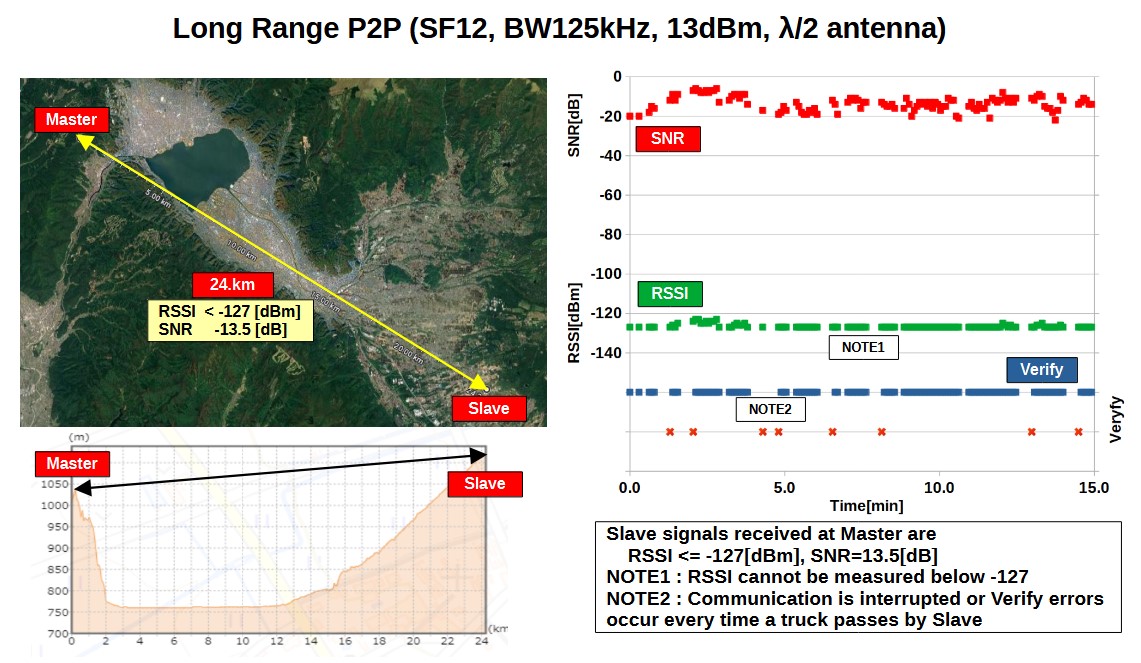
To further extend the communication distance, I used Google Map to find a line-of-sight route. The result was communication over a distance of 24.5 km, RSSI below the measurement limit of -127[dBm], and SNR of -15[dB]. However, it was susceptible to noise, and every time a truck passed by Slave, communication was lost or a verify error occurred, so I think 24 km is the limit.
The procedure is,
- Slave sends a packet (slave ID, random numbers, battery voltage, previous verify result) and waits for the response from Master
- Master receives a packet, checks the slave ID, and sends a packet (master ID, received random numbers, RSSI, SNR, time) in response. Record data to SD.
- Slave receives a packet, checks the master ID, and compares the received random numbers with the sent random numbers.
Sketches used in the experiment
STM32WL_P2P_Verify.zip (31.0 KB)
edit:
There was a problem with some of the sketches.
Since there are many devices communicating in the city, we may always need to check the ID of the communication partner. Here is the corrected sketch.
STM32WL_P2P_Verify_1.zip (31.1 KB)