I followed this guide to the letter
First problem
When I install the software I cet the following message
In file included from src/main.cpp:112:
src/R24dvd.h: In member function 'void UartReadLineSensor::R24_frame_parse_human_information(uint8_t*)':
src/R24dvd.h:726:66: warning: comparison is always true due to limited range of data type [-Wtype-limits]
if (data[FRAME_DATA_INDEX] < 3 && data[FRAME_DATA_INDEX] >= 0) {
~~~~~~~~~~~~~~~~~~~~~~~^~~~
src/R24dvd.h:742:66: warning: comparison is always true due to limited range of data type [-Wtype-limits]
if (data[FRAME_DATA_INDEX] < 9 && data[FRAME_DATA_INDEX] >= 0) {
~~~~~~~~~~~~~~~~~~~~~~~^~~~
src/R24dvd.h:749:66: warning: comparison is always true due to limited range of data type [-Wtype-limits]
if (data[FRAME_DATA_INDEX] < 3 && data[FRAME_DATA_INDEX] >= 0) {
~~~~~~~~~~~~~~~~~~~~~~~^~~~
src/R24dvd.h:762:66: warning: comparison is always true due to limited range of data type [-Wtype-limits]
if (data[FRAME_DATA_INDEX] < 3 && data[FRAME_DATA_INDEX] >= 0) {
~~~~~~~~~~~~~~~~~~~~~~~^~~~
src/R24dvd.h:777:66: warning: comparison is always true due to limited range of data type [-Wtype-limits]
if (data[FRAME_DATA_INDEX] < 9 && data[FRAME_DATA_INDEX] >= 0) {
~~~~~~~~~~~~~~~~~~~~~~~^~~~
src/R24dvd.h:784:66: warning: comparison is always true due to limited range of data type [-Wtype-limits]
if (data[FRAME_DATA_INDEX] < 3 && data[FRAME_DATA_INDEX] >= 0) {
~~~~~~~~~~~~~~~~~~~~~~~^~~~
src/R24dvd.h: In member function 'void UartReadLineSensor::R24_frame_parse_open_underlying_information(uint8_t*)':
src/R24dvd.h:918:66: warning: comparison is always true due to limited range of data type [-Wtype-limits]
if (data[FRAME_DATA_INDEX] < 3 && data[FRAME_DATA_INDEX] >= 0) {
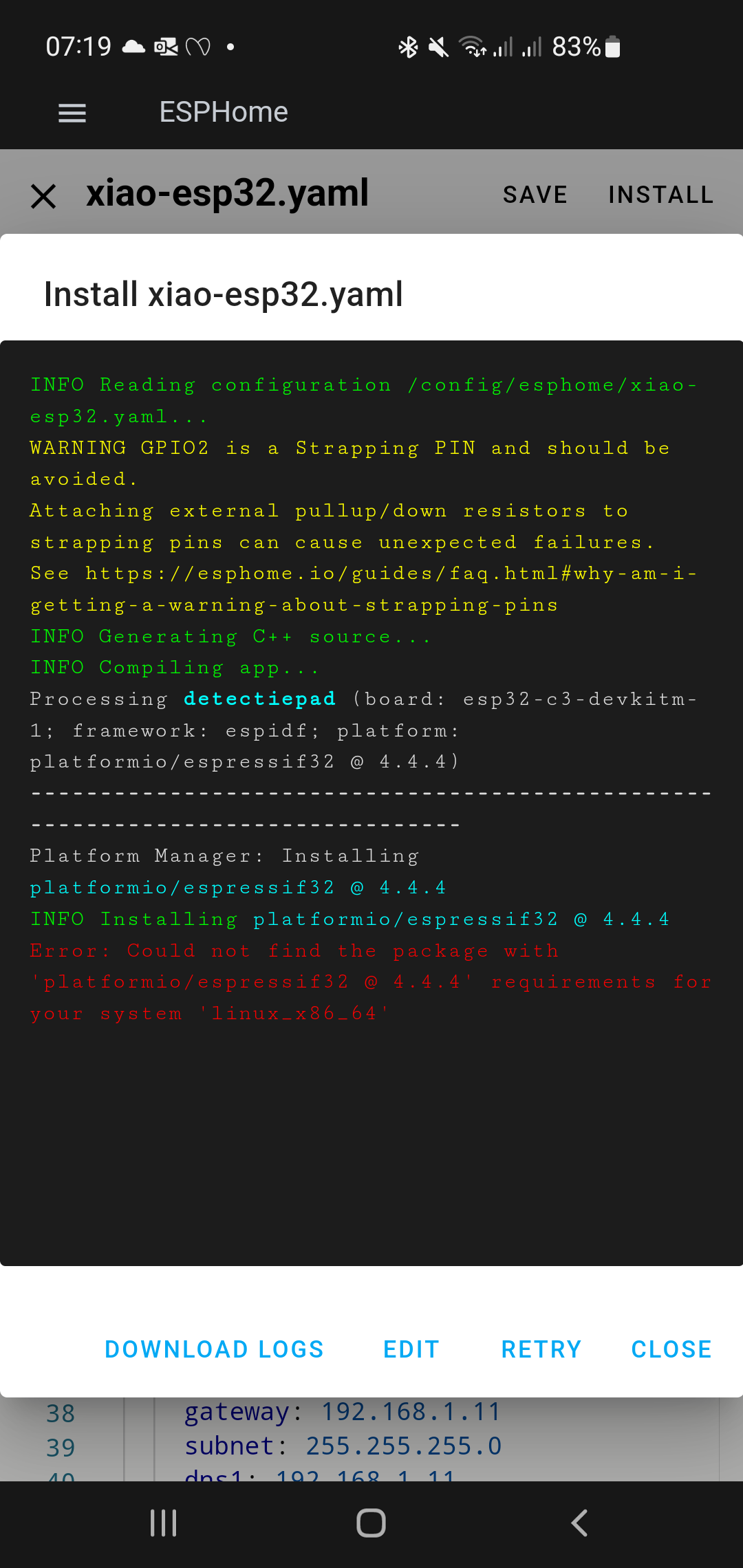
Second problem
When the install is completed I get the following output (no data from the sensor
INFO Waiting for result...
INFO OTA successful
INFO Successfully uploaded program.
INFO Starting log output from mmwave-sensor.local using esphome API
INFO Successfully connected to mmwave-sensor.local
[12:57:08][I][app:102]: ESPHome version 2023.3.2 compiled on Apr 7 2023, 12:56:33
[12:57:08][C][wifi:504]: WiFi:
[12:57:08][C][wifi:362]: Local MAC: 34:85:18:03:21:CC
[12:57:08][C][wifi:363]: SSID: [redacted]
[12:57:08][C][wifi:364]: IP Address: 192.168.1.112
[12:57:08][C][wifi:366]: BSSID: [redacted]
[12:57:08][C][wifi:367]: Hostname: 'mmwave-sensor'
[12:57:08][C][wifi:369]: Signal strength: -33 dB ▂▄▆█
[12:57:08][C][wifi:373]: Channel: 1
[12:57:08][C][wifi:374]: Subnet: 255.255.255.0
[12:57:08][C][wifi:375]: Gateway: 192.168.1.1
[12:57:08][C][wifi:376]: DNS1: 192.168.1.10
[12:57:08][C][wifi:377]: DNS2: 172.30.32.1
[12:57:08][C][logger:293]: Logger:
[12:57:08][C][logger:294]: Level: DEBUG
[12:57:08][C][logger:295]: Log Baud Rate: 115200
[12:57:08][C][logger:296]: Hardware UART: USB_SERIAL_JTAG
[12:57:08][C][uart.idf:116]: UART Bus:
[12:57:08][C][uart.idf:117]: Number: 0
[12:57:08][C][uart.idf:118]: TX Pin: GPIO21
[12:57:08][C][uart.idf:119]: RX Pin: GPIO20
[12:57:08][C][uart.idf:121]: RX Buffer Size: 256
[12:57:08][C][uart.idf:123]: Baud Rate: 115200 baud
[12:57:08][C][uart.idf:124]: Data Bits: 8
[12:57:08][C][uart.idf:125]: Parity: NONE
[12:57:08][C][uart.idf:126]: Stop bits: 1
[12:57:08][C][template.select:065]: Template Select 'Standard Scene mode'
[12:57:08][C][template.select:065]: Icon: 'mdi:hoop-house'
[12:57:08][C][template.select:066]: Update Interval: 60.0s
[12:57:08][C][template.select:069]: Optimistic: YES
[12:57:08][C][template.select:070]: Initial Option: Living room
[12:57:08][C][template.select:071]: Restore Value: NO
[12:57:08][C][template.select:065]: Template Select 'Standard unmanned time'
[12:57:08][C][template.select:065]: Icon: 'mdi:timeline-clock'
[12:57:08][C][template.select:066]: Update Interval: 60.0s
[12:57:08][C][template.select:069]: Optimistic: YES
[12:57:08][C][template.select:070]: Initial Option: None
[12:57:08][C][template.select:071]: Restore Value: NO
[12:57:08][C][template.select:065]: Template Select 'Custom Presence of perception boundary'
[12:57:08][C][template.select:066]: Update Interval: 60.0s
[12:57:08][C][template.select:069]: Optimistic: YES
[12:57:08][C][template.select:070]: Initial Option: 0.5m
[12:57:08][C][template.select:071]: Restore Value: NO
[12:57:08][C][template.select:065]: Template Select 'Custom Motion trigger boundary'
[12:57:08][C][template.select:066]: Update Interval: 60.0s
[12:57:08][C][template.select:069]: Optimistic: YES
[12:57:08][C][template.select:070]: Initial Option: 0.5m
[12:57:08][C][template.select:071]: Restore Value: NO
[12:57:08][C][template.number:050]: Template Number 'Standard sensitivity'
[12:57:08][C][template.number:050]: Icon: 'mdi:archive-check-outline'
[12:57:08][C][template.number:051]: Optimistic: NO
[12:57:08][C][template.number:052]: Update Interval: 2.0s
[12:57:08][C][template.number:050]: Template Number 'Standard Maximum detectable range of moving target'
[12:57:08][C][template.number:050]: Icon: 'mdi:map-marker-path'
[12:57:08][C][template.number:050]: Unit of Measurement: 'cm'
[12:57:08][C][template.number:051]: Optimistic: NO
[12:57:08][C][template.number:052]: Update Interval: 60.0s
[12:57:08][C][template.number:050]: Template Number 'Standard Maximum detectable range of stationary target'
[12:57:08][C][template.number:050]: Icon: 'mdi:map-marker-path'
[12:57:08][C][template.number:050]: Unit of Measurement: 'cm'
[12:57:08][C][template.number:051]: Optimistic: NO
[12:57:08][C][template.number:052]: Update Interval: 60.0s
[12:57:08][C][template.number:050]: Template Number 'Custom Judgment threshold exists'
[12:57:08][C][template.number:051]: Optimistic: NO
[12:57:08][C][template.number:052]: Update Interval: 60.0s
[12:57:08][C][template.number:050]: Template Number 'Custom Motion amplitude trigger threshold'
[12:57:08][C][template.number:051]: Optimistic: NO
[12:57:08][C][template.number:052]: Update Interval: 60.0s
[12:57:08][C][template.number:050]: Template Number 'Custom Mode Settings'
[12:57:08][C][template.number:050]: Icon: 'mdi:cog'
[12:57:08][C][template.number:051]: Optimistic: NO
[12:57:08][C][template.number:052]: Update Interval: 60.0s
[12:57:08][C][template.number:050]: Template Number 'Custom Mode Settings End'
[12:57:08][C][template.number:050]: Icon: 'mdi:cog'
[12:57:08][C][template.number:051]: Optimistic: NO
[12:57:08][C][template.number:052]: Update Interval: 60.0s
[12:57:08][C][template.number:050]: Template Number 'Custom Custom Mode Query'
[12:57:08][C][template.number:050]: Icon: 'mdi:cog'
[12:57:08][C][template.number:051]: Optimistic: NO
[12:57:08][C][template.number:052]: Update Interval: 60.0s
[12:57:08][C][template.number:050]: Template Number 'Custom Motion trigger time'
[12:57:08][C][template.number:050]: Icon: 'mdi:camera-timer'
[12:57:08][C][template.number:050]: Unit of Measurement: 'ms'
[12:57:08][C][template.number:051]: Optimistic: NO
[12:57:08][C][template.number:052]: Update Interval: 60.0s
[12:57:08][C][template.number:050]: Template Number 'Custom Movement to rest time'
[12:57:08][C][template.number:050]: Icon: 'mdi:camera-timer'
[12:57:08][C][template.number:050]: Unit of Measurement: 'ms'
[12:57:08][C][template.number:051]: Optimistic: NO
[12:57:08][C][template.number:052]: Update Interval: 60.0s
[12:57:08][C][template.number:050]: Template Number 'Custom Time of entering unmanned state'
[12:57:08][C][template.number:050]: Icon: 'mdi:camera-timer'
[12:57:08][C][template.number:050]: Unit of Measurement: 'ms'
[12:57:08][C][template.number:051]: Optimistic: NO
[12:57:08][C][template.number:052]: Update Interval: 60.0s
[12:57:08][C][template.text_sensor:021]: Template Sensor 'Standard Product model'
[12:57:08][C][template.text_sensor:021]: Icon: 'mdi:information-outline'
[12:57:08][C][template.text_sensor:021]: Template Sensor 'Standard Product ID'
[12:57:08][C][template.text_sensor:021]: Icon: 'mdi:information-outline'
[12:57:08][C][template.text_sensor:021]: Template Sensor 'Standard Hardware model'
[12:57:08][C][template.text_sensor:021]: Icon: 'mdi:information-outline'
[12:57:08][C][template.text_sensor:021]: Template Sensor 'Standard Firmware version'
[12:57:08][C][template.text_sensor:021]: Icon: 'mdi:information-outline'
[12:57:08][C][template.text_sensor:021]: Template Sensor 'Standard protocol type'
[12:57:08][C][template.text_sensor:021]: Icon: 'mdi:information-outline'
[12:57:08][C][template.text_sensor:021]: Template Sensor 'Standard moving direction'
[12:57:08][C][template.text_sensor:021]: Icon: 'mdi:walk'
[12:57:08][C][template.text_sensor:021]: Template Sensor 'Standard Sports information'
[12:57:08][C][template.text_sensor:021]: Icon: 'mdi:human-greeting'
[12:57:08][C][template.text_sensor:021]: Template Sensor 'Standard Presence information'
[12:57:08][C][template.text_sensor:021]: Icon: 'mdi:motion-sensor'
[12:57:08][C][template.text_sensor:021]: Template Sensor 'Custom Presence of detection'
[12:57:08][C][template.text_sensor:021]: Icon: 'mdi:signal-distance-variant'
[12:57:08][C][template.switch:076]: Template Switch 'Custom Infor output switch'
[12:57:08][C][template.switch:078]: Icon: 'mdi:electric-switch'
[12:57:08][C][template.switch:081]: Assumed State: YES
[12:57:08][C][template.switch:099]: Restore Mode: restore defaults to OFF
[12:57:08][C][template.switch:060]: Restore State: NO
[12:57:08][C][template.switch:061]: Optimistic: NO
[12:57:08][C][template.sensor:023]: Template Sensor 'Custom Motion distance'
[12:57:08][C][template.sensor:023]: State Class: ''
[12:57:08][C][template.sensor:023]: Unit of Measurement: ''
[12:57:08][C][template.sensor:023]: Accuracy Decimals: 1
[12:57:08][C][template.sensor:023]: Icon: 'mdi:signal-distance-variant'
[12:57:08][C][template.sensor:024]: Update Interval: 60.0s
[12:57:08][C][template.sensor:023]: Template Sensor 'Custom Static distance'
[12:57:08][C][template.sensor:023]: State Class: ''
[12:57:08][C][template.sensor:023]: Unit of Measurement: ''
[12:57:08][C][template.sensor:023]: Accuracy Decimals: 1
[12:57:08][C][template.sensor:023]: Icon: 'mdi:signal-distance-variant'
[12:57:08][C][template.sensor:024]: Update Interval: 60.0s
[12:57:08][C][template.sensor:023]: Template Sensor 'Custom Spatial static value'
[12:57:08][C][template.sensor:023]: State Class: ''
[12:57:08][C][template.sensor:023]: Unit of Measurement: ''
[12:57:08][C][template.sensor:023]: Accuracy Decimals: 1
[12:57:08][C][template.sensor:023]: Icon: 'mdi:counter'
[12:57:08][C][template.sensor:024]: Update Interval: 60.0s
[12:57:08][C][template.sensor:023]: Template Sensor 'Custom Spatial motion value'
[12:57:08][C][template.sensor:023]: State Class: ''
[12:57:08][C][template.sensor:023]: Unit of Measurement: ''
[12:57:08][C][template.sensor:023]: Accuracy Decimals: 1
[12:57:08][C][template.sensor:023]: Icon: 'mdi:counter'
[12:57:08][C][template.sensor:024]: Update Interval: 60.0s
[12:57:08][C][template.sensor:023]: Template Sensor 'Custom Motion speed'
[12:57:08][C][template.sensor:023]: State Class: ''
[12:57:08][C][template.sensor:023]: Unit of Measurement: ''
[12:57:08][C][template.sensor:023]: Accuracy Decimals: 1
[12:57:08][C][template.sensor:023]: Icon: 'mdi:run-fast'
[12:57:08][C][template.sensor:024]: Update Interval: 60.0s
[12:57:08][C][mdns:108]: mDNS:
[12:57:08][C][mdns:109]: Hostname: mmwave-sensor
[12:57:08][C][ota:093]: Over-The-Air Updates:
[12:57:08][C][ota:094]: Address: mmwave-sensor.local:3232
[12:57:08][C][ota:097]: Using Password.
[12:57:08][C][api:138]: API Server:
[12:57:08][C][api:139]: Address: mmwave-sensor.local:6053
[12:57:08][C][api:141]: Using noise encryption: YES
[12:57:11][D][api:102]: Accepted 192.168.1.10
[12:57:11][D][api.connection:920]: Home Assistant 2023.3.6 (192.168.1.10): Connected successfully
When I disconnect en reconnect the 5v I get some data from the sensor
[12:57:11][D][api:102]: Accepted 192.168.1.10
[12:57:11][D][api.connection:920]: Home Assistant 2023.3.6 (192.168.1.10): Connected successfully
[13:01:06][D][text_sensor:067]: 'Standard Presence information': Sending state 'Nobody'
[13:01:06][D][R24dvd:722]: Report: someoneExists 0
[13:01:06][D][text_sensor:067]: 'Standard Sports information': Sending state 'None'
[13:01:06][D][R24dvd:729]: Report: motion_status 0
[13:01:06][D][text_sensor:067]: 'Standard moving direction': Sending state 'None'
[13:01:06][D][R24dvd:753]: Report: moving direction 0
[13:01:54][D][text_sensor:067]: 'Standard Sports information': Sending state 'None'
[13:01:56][D][text_sensor:067]: 'Standard moving direction': Sending state 'None'
[13:02:01][D][text_sensor:067]: 'Standard Presence information': Sending state 'Nobody'
[13:02:01][I][ota:113]: Boot seems successful, resetting boot loop counter.
[13:02:01][D][esp32.preferences:113]: Saving 1 preferences to flash...
[13:02:01][D][esp32.preferences:142]: Saving 1 preferences to flash: 0 cached, 1 written, 0 failed
[13:02:54][D][text_sensor:067]: 'Standard Sports information': Sending state 'None'
[13:02:56][D][text_sensor:067]: 'Standard moving direction': Sending state 'None'
[13:03:01][D][text_sensor:067]: 'Standard Presence information': Sending state 'Nobody'
Can’t do much with that data
Third problem
When I try to enable the “mmWave sensor Custom Info output switch” in home assistant it keeps disabling it. So every time I turn it on it keeps getting turned off.
Fourth problem
When I reboot the esp32 I get this output
INFO Reading configuration /config/esphome/mmwave-sensor.yaml...
INFO Starting log output from mmwave-sensor.local using esphome API
INFO Successfully connected to mmwave-sensor.local
[13:12:33][I][app:102]: ESPHome version 2023.3.2 compiled on Apr 6 2023, 11:41:02
[13:12:33][C][wifi:504]: WiFi:
[13:12:33][C][wifi:362]: Local MAC: 34:85:18:03:21:CC
[13:12:33][C][wifi:363]: SSID: [redacted]
[13:12:33][C][wifi:364]: IP Address: 192.168.1.112
[13:12:33][C][wifi:366]: BSSID: [redacted]
[13:12:33][C][wifi:367]: Hostname: 'mmwave-sensor'
[13:12:33][C][wifi:369]: Signal strength: -30 dB ▂▄▆█
[13:12:33][C][wifi:373]: Channel: 1
[13:12:33][C][wifi:374]: Subnet: 255.255.255.0
[13:12:33][C][wifi:375]: Gateway: 192.168.1.1
[13:12:33][C][wifi:376]: DNS1: 192.168.1.10
[13:12:33][C][wifi:377]: DNS2: 172.30.32.1
[13:12:33][C][logger:293]: Logger:
[13:12:33][C][logger:294]: Level: DEBUG
[13:12:33][C][logger:295]: Log Baud Rate: 115200
[13:12:33][C][logger:296]: Hardware UART: UART0
[13:12:33][C][captive_portal:088]: Captive Portal:
[13:12:33][C][mdns:108]: mDNS:
[13:12:33][C][mdns:109]: Hostname: mmwave-sensor
[13:12:33][C][ota:093]: Over-The-Air Updates:
[13:12:33][C][ota:094]: Address: mmwave-sensor.local:3232
[13:12:33][C][ota:097]: Using Password.
[13:12:33][C][api:138]: API Server:
[13:12:33][C][api:139]: Address: mmwave-sensor.local:6053
[13:12:33][C][api:141]: Using noise encryption: YES
And the it stops also whe I reconnect the USB I have the same problem
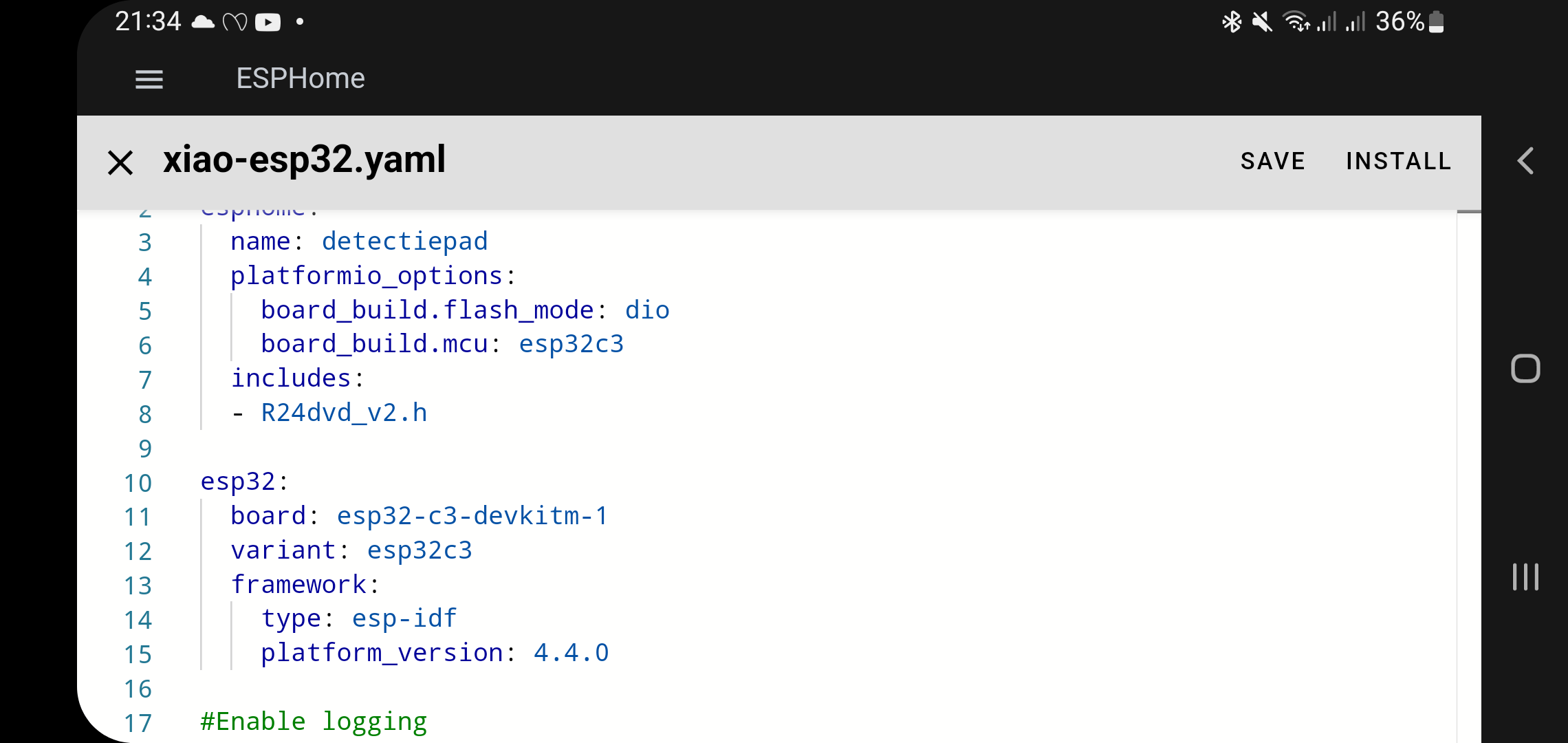
This is the complete yaml code
esphome:
name: mmwave-sensor
friendly_name: mmWave sensor
platformio_options:
board_build.flash_mode: dio
board_build.mcu: esp32c3
includes:
- R24dvd.h
esp32:
board: esp32-c3-devkitm-1
variant: esp32c3
framework:
type: esp-idf
# Enable logging
logger:
hardware_uart: USB_SERIAL_JTAG
level: DEBUG
# Enable Home Assistant API
api:
encryption:
key: "xxxxxxx"
ota:
password: "xxxxxxxx"
wifi:
ssid: !secret wifi_ssid
password: !secret wifi_password
# Enable fallback hotspot (captive portal) in case wifi connection fails
ap:
ssid: "Mmwave-Sensor Fallback Hotspot"
password: "a0UxfyldyYiT"
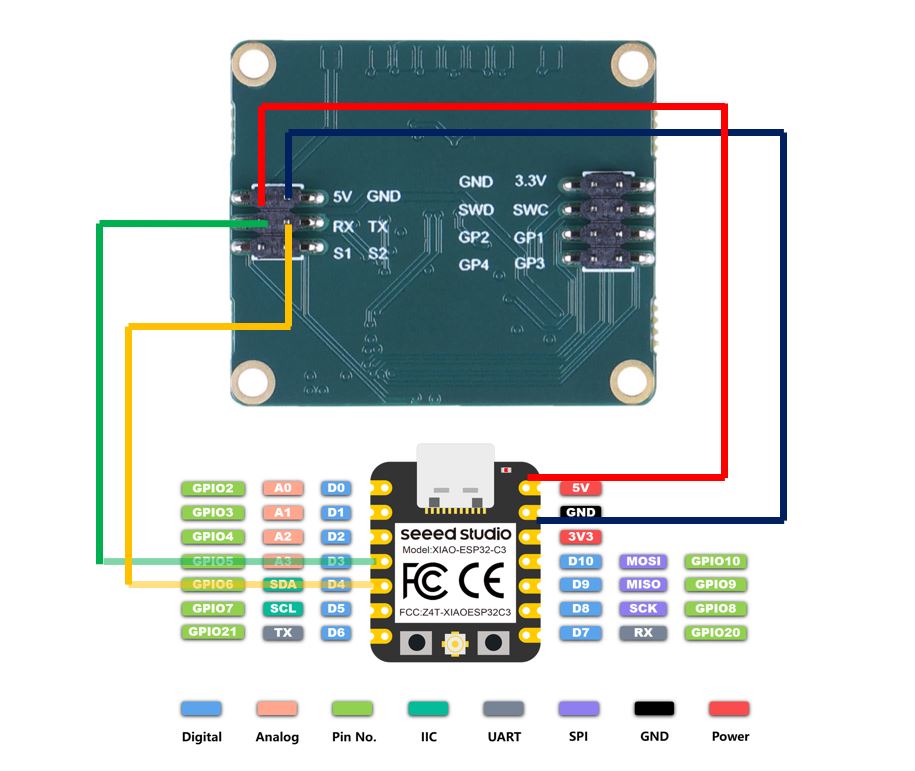
# part 3:
uart:
id: uart_bus
baud_rate: 115200
rx_pin: 20
tx_pin: 21
select:
- platform: template
name: "Standard Scene mode"
id: scene_mode
icon: mdi:hoop-house
optimistic: true
options:
- "Living room"
- "Area detection"
- "Washroom"
- "Bedroom"
initial_option: "Living room"
set_action:
- logger.log:
format: "set action option: %s"
args: ["x.c_str()"]
- uart.write: !lambda
auto index = id(scene_mode).index_of(x);
uint8_t value = (uint8_t)index.value() + 1;
uint8_t crc = value + 0xB9;
return {0x53,0x59,0x05,0x07,0x00,0x01,value,crc,0x54,0x43};
- platform: template
name: "Standard unmanned time"
id: unmanned_time
icon: mdi:timeline-clock
optimistic: true
options:
- "None"
- "10s"
- "30s"
- "1min"
- "2min"
- "5min"
- "10min"
- "30min"
- "1hour"
initial_option: "None"
set_action:
- logger.log:
format: "Chosen option: %s"
args: ["x.c_str()"]
- uart.write: !lambda
auto index = id(unmanned_time).index_of(x);
uint8_t value = (uint8_t)index.value();
uint8_t crc = value + 0x37;
return {0x53,0x59,0x80,0x0a,0x00,0x01,value,crc,0x54,0x43};
- platform: template
name: "Custom Presence of perception boundary"
id: custom_presence_of_perception_boundary
optimistic: true
options:
- "0.5m"
- "1.0m"
- "1.5m"
- "2.0m"
- "2.5m"
- "3.0m"
- "3.5m"
- "4.0m"
- "4.5m"
- "5.0m"
set_action:
- logger.log:
format: "Chosen option: %s"
args: ["x.c_str()"]
- uart.write: !lambda
auto index = id(unmanned_time).index_of(x);
uint8_t value = (uint8_t)index.value() + 1;
uint8_t crc = value + 0xBF;
return {0x53,0x59,0x08,0x0a,0x00,0x01,value,crc,0x54,0x43};
- platform: template
name: "Custom Motion trigger boundary"
id: custom_motion_trigger_boundary
optimistic: true
options:
- "0.5m"
- "1.0m"
- "1.5m"
- "2.0m"
- "2.5m"
- "3.0m"
- "3.5m"
- "4.0m"
- "4.5m"
- "5.0m"
set_action:
- logger.log:
format: "Chosen option: %s"
args: ["x.c_str()"]
- uart.write: !lambda
auto index = id(unmanned_time).index_of(x);
uint8_t value = (uint8_t)index.value() + 1;
uint8_t crc = value + 0xC0;
return {0x53,0x59,0x08,0x0b,0x00,0x01,value,crc,0x54,0x43};
number:
- platform: template
id: sensitivity
name: "Standard sensitivity"
icon: mdi:archive-check-outline
min_value: 0
max_value: 3
optimistic: false
step: 1
update_interval: 2s
set_action:
- uart.write: !lambda
uint8_t crc = x + 0xBA;
return {0x53,0x59,0x05,0x08,0x00,0x01,(uint8_t)x,crc,0x54,0x43};
- platform: template
name: "Standard Maximum detectable range of moving target"
id: moving_target_detection_max_distance
icon: mdi:map-marker-path
unit_of_measurement: "cm"
min_value: 0
max_value: 65536
step: 500
set_action:
- uart.write: !lambda
int h_num = (int)x >> 8;
int l_num = (int)x & 0xff;
int crc = 0xB6 + h_num + l_num;
return {0x53,0x59,0x07,0x01,0x00,0x02,(uint8_t)(h_num),(uint8_t)(l_num),(uint8_t)crc,0x54,0x43};
- platform: template
name: "Standard Maximum detectable range of stationary target"
id: static_target_detection_max_distance
icon: mdi:map-marker-path
unit_of_measurement: cm
min_value: 0
max_value: 65536
step: 500
set_action:
- uart.write: !lambda
int h_num = (int)x >> 8;
int l_num = (int)x & 0xff;
int crc = 0xB9 + h_num + l_num;
return {0x53,0x59,0x07,0x04,0x00,0x02,(uint8_t)(h_num),(uint8_t)(l_num),(uint8_t)crc,0x54,0x43};
- platform: template
name: "Custom Judgment threshold exists"
id: custom_judgment_threshold_exists
min_value: 0
max_value: 250
step: 1
set_action:
- uart.write: !lambda
int crc = 0xBD + (int)x;
return {0x53,0x59,0x08,0x08,0x00,0x01,(uint8_t)x,(uint8_t)crc,0x54,0x43};
- platform: template
name: "Custom Motion amplitude trigger threshold"
id: custom_motion_amplitude_trigger_threshold
min_value: 0
max_value: 250
step: 1
set_action:
- uart.write: !lambda
int crc = 0xBE + (int)x;
return {0x53,0x59,0x08,0x09,0x00,0x01,(uint8_t)x,(uint8_t)crc,0x54,0x43};
- platform: template
name: "Custom Mode Settings"
id: custom_mode_settings
icon: mdi:cog
min_value: 0
max_value: 250
step: 1
set_action:
- uart.write: !lambda
int crc = 0xBB + (int)x;
return {0x53,0x59,0x05,0x09,0x00,0x01,(uint8_t)x,(uint8_t)crc,0x54,0x43};
- platform: template
name: "Custom Mode Settings End"
id: custom_mode_setting_completed
icon: mdi:cog
min_value: 0
max_value: 250
step: 1
set_action:
- uart.write: !lambda
int crc = 0xBC + (int)x;
return {0x53,0x59,0x05,0x0a,0x00,0x01,(uint8_t)x,(uint8_t)crc,0x54,0x43};
- platform: template
name: "Custom Custom Mode Query"
icon: mdi:cog
id: custom_mode_query
min_value: 0
max_value: 250
step: 1
set_action:
- uart.write: !lambda
int crc = 0x3B + (int)x;
return {0x53,0x59,0x05,0x89,0x00,0x01,(uint8_t)x,(uint8_t)crc,0x54,0x43};
- platform: template
name: "Custom Motion trigger time"
id: custom_motion_trigger_time
icon: mdi:camera-timer
unit_of_measurement: "ms"
min_value: 0
max_value: 4294967295
step: 5000
set_action:
- uart.write: !lambda
int crc = 0xC4 + (int)x;
int h24_num = ((int)x >> 24) & 0xff;
int h16_num = ((int)x >> 16) & 0xff;
int h8_num = ((int)x >> 8) & 0xff;
int l8_num = (int)x & 0xff;
return {0x53,0x59,0x08,0x0c,0x00,0x04,(uint8_t)h24_num,(uint8_t)h16_num,(uint8_t)h8_num,(uint8_t)l8_num,(uint8_t)crc,0x54,0x43};
- platform: template
name: "Custom Movement to rest time"
id: custom_movement_to_rest_time
icon: mdi:camera-timer
unit_of_measurement: "ms"
min_value: 0
max_value: 4294967295
step: 5000
set_action:
- uart.write: !lambda
int crc = 0xC5 + (int)x;
int h24_num = ((int)x >> 24) & 0xff;
int h16_num = ((int)x >> 16) & 0xff;
int h8_num = ((int)x >> 8) & 0xff;
int l8_num = (int)x & 0xff;
return {0x53,0x59,0x08,0x0d,0x00,0x04,(uint8_t)h24_num,(uint8_t)h16_num,(uint8_t)h8_num,(uint8_t)l8_num,(uint8_t)crc,0x54,0x43};
- platform: template
name: "Custom Time of entering unmanned state"
id: custom_time_of_enter_unmanned
icon: mdi:camera-timer
unit_of_measurement: "ms"
min_value: 0
max_value: 4294967295
step: 5000
set_action:
- uart.write: !lambda
int crc = 0xC6 + (int)x;
int h24_num = ((int)x >> 24) & 0xff;
int h16_num = ((int)x >> 16) & 0xff;
int h8_num = ((int)x >> 8) & 0xff;
int l8_num = (int)x & 0xff;
return {0x53,0x59,0x08,0x0e,0x00,0x04,(uint8_t)h24_num,(uint8_t)h16_num,(uint8_t)h8_num,(uint8_t)l8_num,(uint8_t)crc,0x54,0x43};
text_sensor:
- platform: custom
lambda: |-
auto my_custom_sensor = new MyCustomTextSensor();
App.register_component(my_custom_sensor);
return {my_custom_sensor->Heartbeat};
text_sensors:
- name: "Standard Heartbeat"
icon: mdi:connection
- platform: template
name: "Standard Product model"
id: product_mode
icon: mdi:information-outline
on_raw_value:
then:
- logger.log: text_sensor on_raw_value
- platform: template
name: "Standard Product ID"
id: product_id
icon: mdi:information-outline
- platform: template
name: "Standard Hardware model"
id: hardware_model
icon: mdi:information-outline
- platform: template
name: "Standard Firmware version"
id: firmware_version
icon: mdi:information-outline
- platform: template
name: "Standard protocol type"
id: protocol_type
icon: mdi:information-outline
- platform: template
name: "Standard moving direction"
id: keep_away
icon: mdi:walk
- platform: template
name: "Standard Sports information"
id: motion_status
icon: mdi:human-greeting
- platform: template
name: "Standard Presence information"
id: someoneExists
icon: "mdi:motion-sensor"
- platform: template
name: "Custom Presence of detection"
id: custom_presence_of_detection
icon: mdi:signal-distance-variant
# - platform: template
# name: "Custom Motion distance"
# id: custom_motion_distance
# - platform: template
# name: "Custom Static distance"
# id: custom_static_distance
# - platform: template
# name: "Custom Spatial static value"
# id: custom_spatial_static_value
# - platform: template
# name: "Custom Spatial motion value"
# id: custom_spatial_motion_value
# - platform: template
# name: "Custom Motion speed"
# id: custom_motion_speed
button:
- platform: template
name: "Standard reset"
id: "reset"
icon: mdi:reload
on_press:
then:
- logger.log: Button Pressed
- uart.write: [0x53,0x59,0x01,0x02,0x00,0x01,0x0F,0xBF,0x54,0x43]
switch:
- platform: template
id: output_info_switch
name: "Custom Infor output switch"
icon: mdi:electric-switch
assumed_state: true
turn_on_action:
- uart.write: [0x53,0x59,0x08,0x00,0x00,0x01,0x01,0xB6,0x54,0x43]
- delay: 1s
- lambda: !lambda |-
id(product_mode).publish_state("");
id(product_id).publish_state("");
id(hardware_model).publish_state("");
id(firmware_version).publish_state("");
id(protocol_type).publish_state("");
turn_off_action:
- uart.write: [0x53,0x59,0x08,0x00,0x00,0x01,0x00,0xB5,0x54,0x43]
sensor:
- platform: custom
lambda: |-
auto my_custom_sensor = new UartReadLineSensor(id(uart_bus));
App.register_component(my_custom_sensor);
return {
my_custom_sensor->movementSigns,
my_custom_sensor->inited,
};
sensors:
- name: "Standard body movement"
id: movementSigns
icon: "mdi:human-greeting-variant"
device_class: "temperature"
state_class: "measurement"
- name: "Standard inited"
id: inited
icon: mdi:all-inclusive
- platform: template
name: "Custom Motion distance"
id: custom_motion_distance
icon: mdi:signal-distance-variant
on_value:
then:
# - logger.log: Custom Motion distance on_value
- logger.log:
format: "Custom Motion distance on_value : %d"
args: ["x"]
on_raw_value:
then:
- logger.log:
format: "Custom Motion distance on_raw_value : %d"
args: ["x"]
- platform: template
name: "Custom Static distance"
id: custom_static_distance
icon: mdi:signal-distance-variant
- platform: template
name: "Custom Spatial static value"
id: custom_spatial_static_value
icon: mdi:counter
- platform: template
name: "Custom Spatial motion value"
id: custom_spatial_motion_value
icon: mdi:counter
- platform: template
name: "Custom Motion speed"
id: custom_motion_speed
icon: mdi:run-fast
Hope you guy have some tips how to go from here