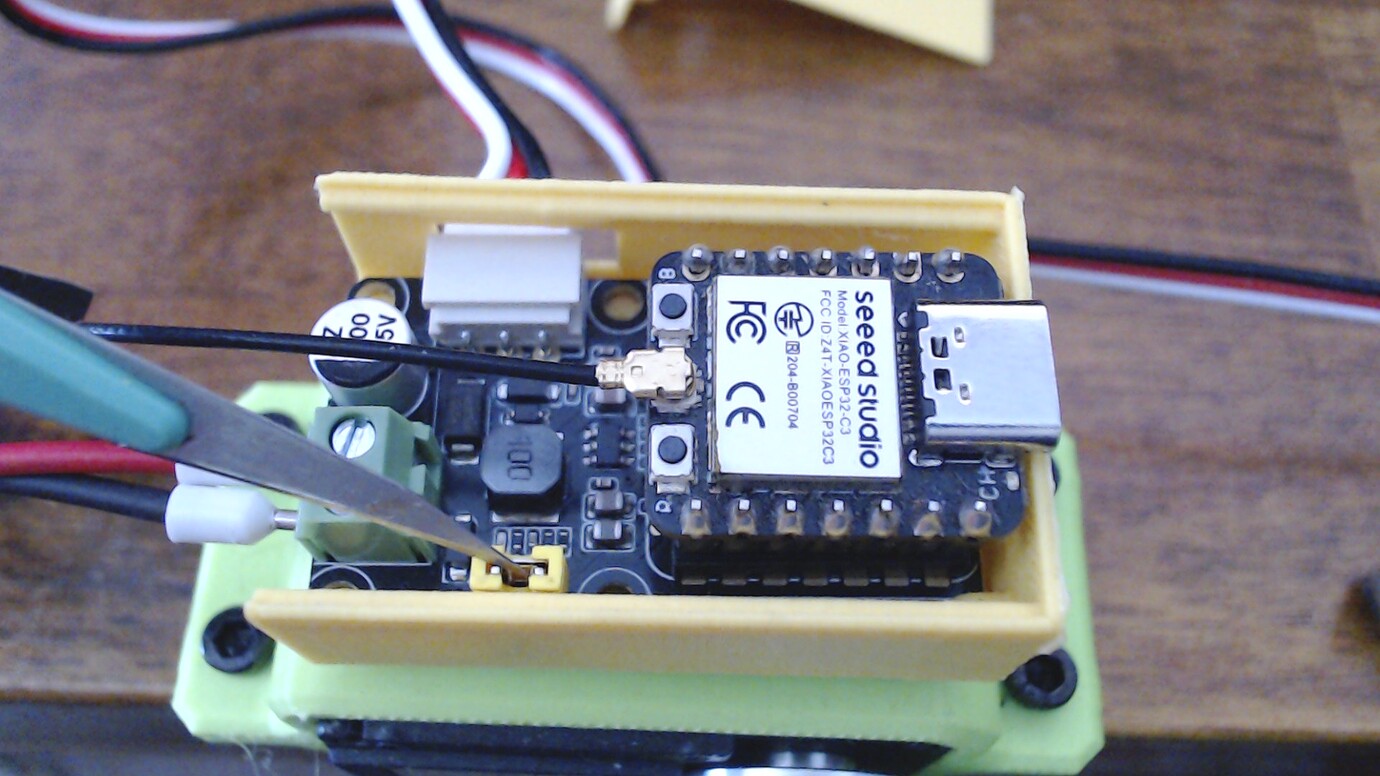
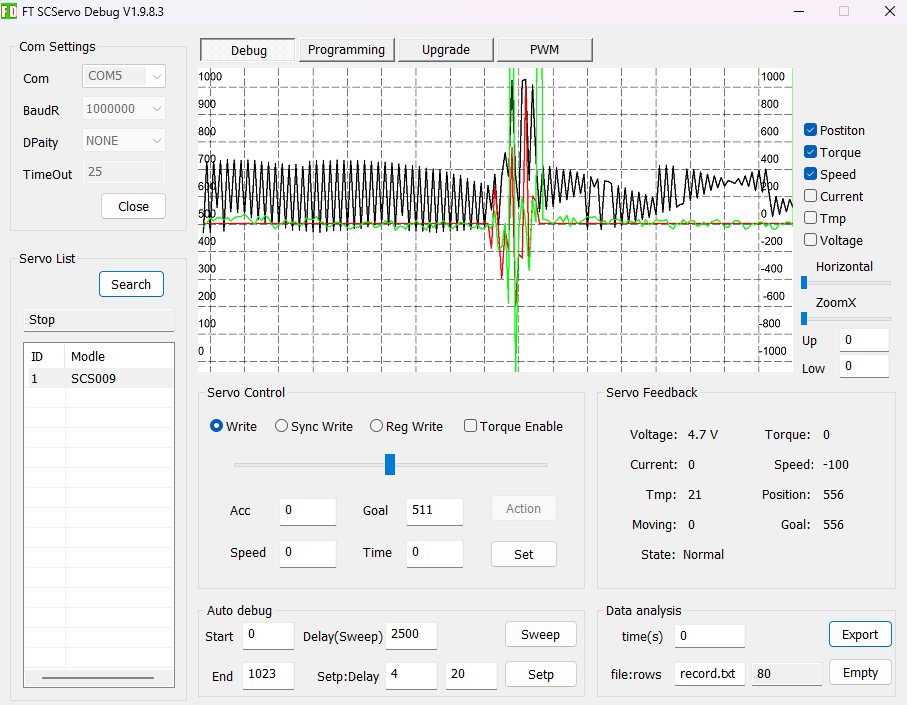
Building the Amazing Hand kit, I’ve reached the finger calibration step involving connecting the servos. Using the program FT SCServo debug 1.9.8.3, I can set individual IDs to the servos, but setting any rotation value makes the servo go completely haywire, making what appears to be random movements. Even when just connected, the monitored values are fluctuating heavily.
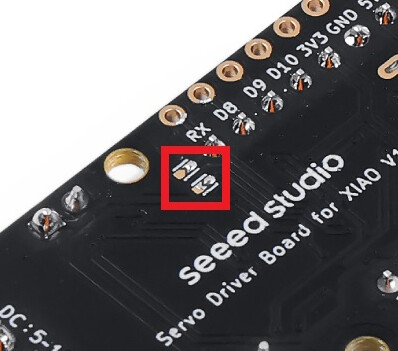
I’ve tried all connected/unconnected combinations of the jumper pins and backside pads, no difference.
“No matter, I’ll just use a xiao” I thought but that failed even more; whatever I try, I can’t even ping the servos.
Questions:
- Why does the servo go bananas when using the FT SCServo program?
- What’s the correct voltage? The product page for the amazing hand says 12V adapter, the servo spec says 6V but the enclosed adapter is 5V. I’ve tried a 6V I had as well but that made no difference.
- Does the topside jumper matter at all when going the xiao/uart route?
- What’s a minimum working program for xiao esp32c6?
- What am I doing wrong? Is the board defect or is it me?
- Is there a single Seeed product with worse documentation than the amazing hand? The level of “eh, you’ll figure it out” is breathtaking.