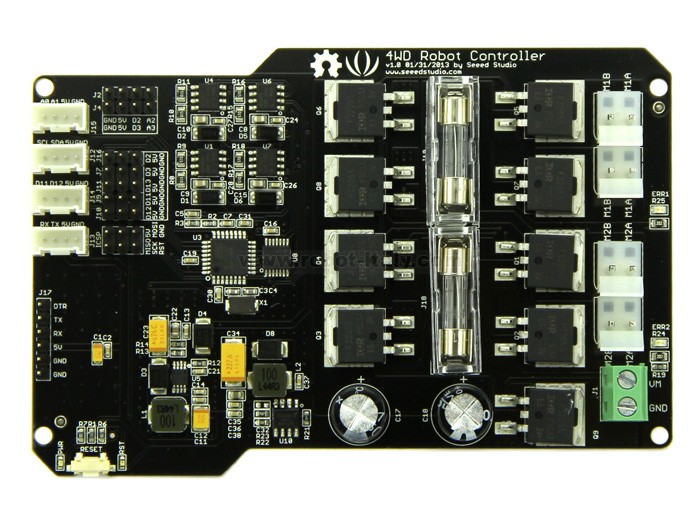
The problem with the feedbacksensors is solved too. Now the device is 100% working.
I you want to know how i solved it, then look at the code. You can download the sourcecode at http://www.mechanicape.nl/hercules-4wd and http://www.mechanicape.nl/sites/default/files/hercules-131011a.zip
//MECHANICAPE.NL FIRMWARE FOR SEEEDSTUDIO HERCULES 4WD CONTROLLER
//Copyright By Rein Velt / http://mechanicape.nl
//May be used under the terms and conditions of Create Commons CC-BY-SA
//=====================================================================
// The device is controlled by serial commands. The command is send
// to the controllerboard. The controllerboard performs the
// requested action and sends a response message
// back to the requestor.
// The commands, descriptions and responses are:
// CMD DESCRIPTION RESPONSE
// M0 Motor OFF -returns M0,speedL,speedR\n
// M1 Motor Forward -returns M1,speedL,speedR\n
// M2 Motor Reverse -returns M2,speedL,speedR\n
// M3 Motor Turn Left (ccw) -returns M3,speedL,speedR\n
// M4 Motor Turn Right (cw) -returns M4,speedL,speedR\n
// MT Motor Test (test motors) -returns MT,speedL,speedR\n
// S0..S9 Speed (0=stop,.., 9=fast) -returns S*,speedL,speedR\n
// B? Query battery voltage -returns B?,millivolts\n
//
// the comma is used to separate commands when more are following
// the newline is used to terminate one or more commands
// eg:
// M1\n
// S5,M1,M1,S3,M2,M3,M0\n
//====================================================================
#include <avr/wdt.h>
// pin ctrl
#define PINRX 0 // receive serial data
#define PINTX 1 // send serial data
#define PININT0 2 // interrupt 0
#define PININT1 3 // interrupt 1
#define PINCS 6 // all motors cs
#define PINM1F 4 // motor 1 forward
#define PINM1R 5 // motor 1 reverse
#define PINM2F 7 // motor 2 forward
#define PINM2R 8 // motor 2 reverse
#define PINPWMA 9 // PWM channel A (motor A speed)
#define PINPWMB 10 // PWM channel B (motor B speed)
#define PINVS A6 // voltage/battery sensor
//global vars
volatile int leftFeedback = 0;
volatile int rightFeedback = 0;
int motorSpeed=0;
void setup()
{
//initialize pins (make them output)
pinMode(PINCS, OUTPUT);
pinMode(PINM1F, OUTPUT);
pinMode(PINM1R, OUTPUT);
pinMode(PINM2F, OUTPUT);
pinMode(PINM2R, OUTPUT);
pinMode(PINVS, INPUT);
//initialize motors
motorStop();
//initialize interrupts
attachInterrupt(0, leftInterruptHandler, CHANGE);
attachInterrupt(1, rightInterruptHandler, CHANGE);
//initialize serial port
Serial.begin(19200);
Serial.println("//MECHANIC APE HERCULES 4WD ROBOTFIRMWARE V1.0");
Serial.print("//Battery=");
Serial.print(getBatteryVoltage());
Serial.print("mV");
Serial.println();
Serial.println("OK");
//initialize watch dog timer and set it to 2 seconds
wdt_enable(WDTO_2S);
}
void loop()
{
wdt_reset(); //reset watch dog timer
processSerialData(); //read data from serial and send it to the motors
resetFeedback(); //reset speed sensors
}
//**** INTERRUPT HANDLER ******************************************************************************
void leftInterruptHandler()
{
leftFeedback++;
}
void rightInterruptHandler()
{
rightFeedback++;
}
void resetFeedback()
{
leftFeedback=0;
rightFeedback=0;
}
//**** MOTOR CONTROLLER *******************************************************************************
void motorSetSpeed(int power)
{
motorSpeed=power;
analogWrite(PINPWMA,motorSpeed);
analogWrite(PINPWMB,motorSpeed);
}
void motorStop()
{
digitalWrite(PINCS,LOW);
digitalWrite(PINM1R,LOW);
digitalWrite(PINM1F,LOW);
digitalWrite(PINM2F,LOW);
digitalWrite(PINM2R,LOW);
}
void motorForward()
{
digitalWrite(PINM1R,HIGH);
digitalWrite(PINM1F,LOW);
digitalWrite(PINM2F,HIGH);
digitalWrite(PINM2R,LOW);
digitalWrite(PINCS,HIGH);
}
void motorReverse()
{
digitalWrite(PINM1R,LOW);
digitalWrite(PINM1F,HIGH);
digitalWrite(PINM2F,LOW);
digitalWrite(PINM2R,HIGH);
digitalWrite(PINCS,HIGH);
}
void motorTurnLeft()
{
digitalWrite(PINM1R,LOW);
digitalWrite(PINM1F,HIGH);
digitalWrite(PINM2F,HIGH);
digitalWrite(PINM2R,LOW);
digitalWrite(PINCS,HIGH);
}
void motorTurnRight()
{
digitalWrite(PINM1R,HIGH);
digitalWrite(PINM1F,LOW);
digitalWrite(PINM2F,LOW);
digitalWrite(PINM2R,HIGH);
digitalWrite(PINCS,HIGH);
}
//**** MESSAGE HANDLING ******************************************************************************
void processSerialData()
{
if (Serial.available()>2)
{
int commandByte= Serial.read();
int valueByte = Serial.read();
int endofline = Serial.read();
//a message has 3 bytes
//this first byte is always M (Motor) or S (Speed)
//the second byte is a number (0|1|2|3|4|..|9)
//the third byte is a comma or a newline (,|\n)
//handle the motor request
if (commandByte==77 && (endofline==10 || endofline==44)) //M
{
//incoming data is correct and conform specs
motorSetSpeed(motorSpeed);
switch (valueByte)
{
//control the motors
case 48+0:
motorStop();
break; //M0\n
case 48+1:
motorForward();
break; //M1\n
case 48+2:
motorReverse();
break; //M2\n
case 48+3:
motorTurnLeft();
break; //M3\n
case 48+4:
motorTurnRight();
break; //M4\n
case 84:
motorTest(); //MT\n
break;
default:
motorStop();
break; //fail safe
} //end-switch
//confirm the serial request by sending a response
Serial.print(char(commandByte));
Serial.print(char(valueByte));
Serial.print(char(44));
Serial.print(leftFeedback);
Serial.print(char(44));
Serial.print(rightFeedback);
Serial.println();
}
//handle the motorspeed request
if (commandByte==83 && (endofline==10 || endofline==44)) //S
{
//incoming data is correct and conform specs
if (valueByte>47 && valueByte<59)
{
//set the motorspeed
int motorNewSpeed=(valueByte-48)*26;
motorSetSpeed(motorNewSpeed);
}
//confirm the serial request by sending a response
Serial.print(char(commandByte));
Serial.println(char(valueByte));
}
//handle the battery voltage request
if (commandByte==66 && (endofline==10 || endofline==44)) //B
{
int millivolt=getBatteryVoltage();
//confirm the serial request by sending a response
Serial.print(char(commandByte));
Serial.print(char(valueByte));
Serial.print(char(44));
Serial.print(millivolt);
Serial.println();
}
}
else
{
//no data
motorStop(); //fail safe
}
delay(100); //this delay can be tweaked or omitted to adjust accuracy. keep it low!
}
//***** SENSOR HANDLING ******************************************************************************
int getBatteryVoltage()
{
int value=analogRead(PINVS);
int millivolt=round((float)(value)/0.037479); //guess
return millivolt;
}
//***** SYSTEM TEST **********************************************************************************
void motorTest()
{
for (int i=0;i<255;i++)
{
wdt_reset();
motorSetSpeed(i);
motorTurnRight();
delay(50) ;
}
for (int i=255;i>-1;i--)
{
wdt_reset();
motorSetSpeed(i);
motorTurnRight();
delay(50) ;
}
motorStop();
}
//*****************************************************************************************************
// * END FILE
// *****************************************************************************************************