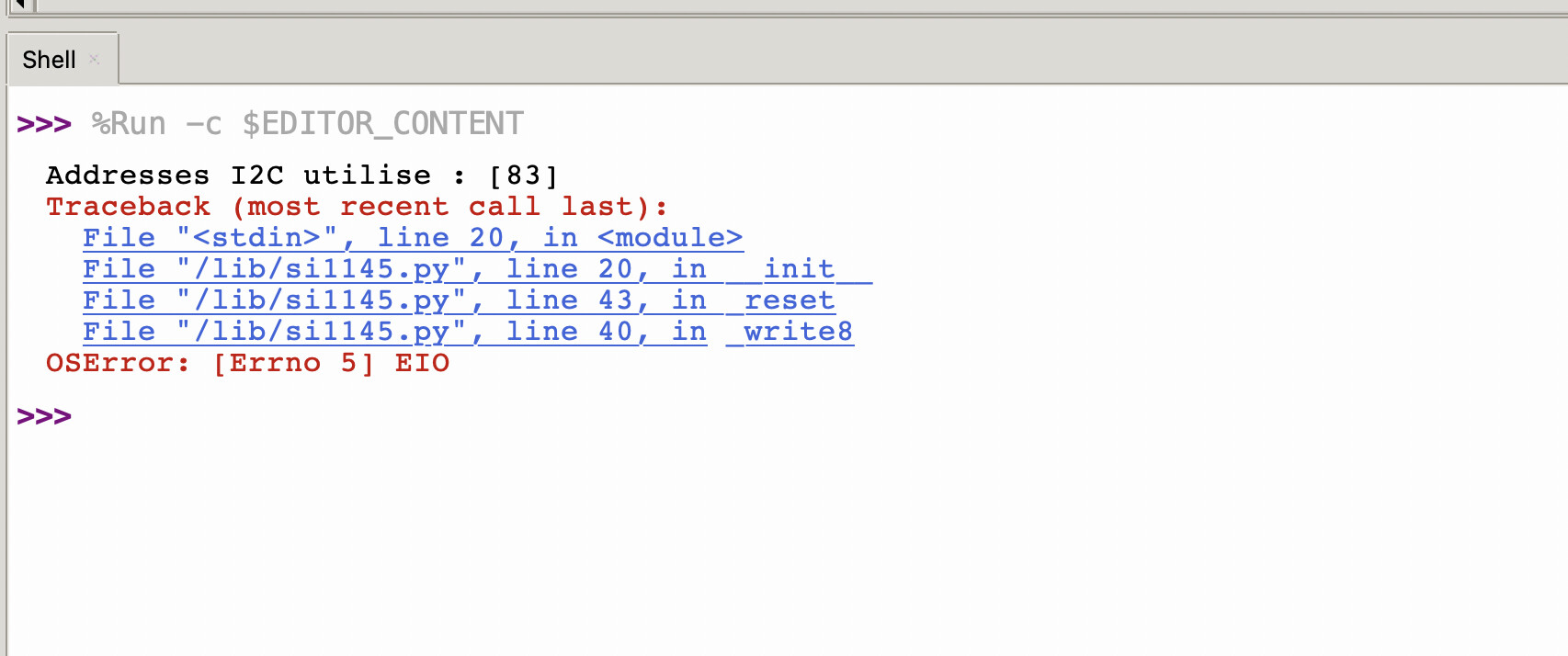
I am trying to program Grove - Sunlight Sensor SI1145 with MicroPython but I keep get an error
I am using the code from Capteur de lumière solaire SI1145 as I have 2 files, sunlight.py as below:
from time import sleep_ms # Pour gérer les temporisations
from machine import I2C # Pour gérer l’I2C
import si1145 # Pour gérer le capteur
i2c1 = I2C(1)
sleep_ms(1000)
print("Addresses I2C utilise : " + str(i2c1.scan()))
sensor = si1145.SI1145(i2c=i2c1)
while True :
# Indice UV
uv_index = sensor.read_uv
# Valeur caractéristique de l'intensité du rayonnement infrarouge
ir_analog = sensor.read_ir
# Valeur caractéristique de l'intensité du rayonnement visible
visible_analog = sensor.read_visible
# Affichage
print(" Indice UV: %d\n IR: %d (AU)\n Visible: %d (AU)\n" % (uvindex, ir, visible))
# Temporisation de 5 secondes
sleep_ms(5000)
and si1145.py as below:
“”"
MicroPython driver for SI1145 light I2C sensor, low memory version :
]Version: 0.3.0 @ 2018/04/02
“”"
import time
from ustruct import unpack
I2C_ADDRESS = const(0x60)
class SI1145(object):
def __init__(self, i2c=None, addr=I2C_ADDRESS):
if i2c is None:
raise ValueError('An I2C object is required.')
self._i2c = i2c
self._i2c.scan()
self._addr = addr
self._reset()
self._load_calibration()
def _read8(self, register):
result = unpack(
'B',
self._i2c.readfrom_mem(
self._addr, register, 1)
)[0] & 0xFF
return result
def _read16(self, register, little_endian=True):
result = unpack('BB', self._i2c.readfrom_mem(self._addr, register, 2))
result = ((result[1] << 8) | (result[0] & 0xFF))
if not little_endian:
result = ((result << 8) & 0xFF00) + (result >> 8)
return result
def _write8(self, register, value):
value = value & 0xFF
self._i2c.writeto_mem(self._addr, register, bytes([value]))
def _reset(self):
self._write8(0x08, 0x00)
self._write8(0x09, 0x00)
self._write8(0x04, 0x00)
self._write8(0x05, 0x00)
self._write8(0x06, 0x00)
self._write8(0x03, 0x00)
self._write8(0x21, 0xFF)
self._write8(0x18, 0x01)
time.sleep(.01)
self._write8(0x07, 0x17)
time.sleep(.01)
def _write_param(self, parameter, value):
self._write8(0x17, value)
self._write8(0x18, parameter | 0xA0)
return self._read8(0x2E)
def _load_calibration(self):
self._write8(0x13, 0x7B)
self._write8(0x14, 0x6B)
self._write8(0x15, 0x01)
self._write8(0x16, 0x00)
self._write_param( 0x01, 0x80 | 0x40 | 0x20 | 0x10 | 0x01)
self._write8(0x03, 0x01)
self._write8(0x04, 0x01)
self._i2c.writeto_mem(0x60, 0x0F, b'0x03')
self._write_param(0x07, 0x03)
self._write_param(0x02, 0x01)
self._write_param(0x0B, 0)
self._write_param(0x0A, 0x70)
self._write_param(0x0C, 0x20 | 0x04)
self._write_param(0x0E, 0x00)
self._write_param(0x1E, 0)
self._write_param(0x1D, 0x70)
self._write_param(0x1F, 0x20)
self._write_param(0x11, 0)
self._write_param(0x10, 0x70)
self._write_param(0x12, 0x20)
self._write8(0x08, 0xFF)
self._write8(0x18, 0x0F)
@property
def read_uv(self):
return self._read16(0x2C, little_endian=True) / 100
@property
def read_visible(self):
return self._read16(0x22, little_endian=True)
@property
def read_ir(self):
return self._read16(0x24, little_endian=True)
@property
def read_prox(self):
return self._read16(0x26, little_endian=True)