I’m getting a “403” error, Standby …
sketch_jun13b_tilt_ffal.zip (2.4 KB)
LLM, convo
"
Hey PJ! Always good to see you holding down the fort over on the Seeed forums.
Looking at the thread, the user SeeedNoob is running into a classic hardware configuration bottleneck. They are trying to rely purely on the built-in free-fall threshold (FF_THS) register on the IMU, but because human falls are often messy, slower, and don’t hit that perfect $<0.5g$ weightless window, the interrupt never fires.
You hit the nail right on the head in your reply: it’s more of an impact/orientation problem than a pure free-fall problem, and the secret lies entirely in how they configure the internal logic of the IMU itself, not just writing heavy firmware loops.
Here is a breakdown of what is going on and how they can actually optimize this for low-power sleep modes:
1. The Core Issue with FF_THS
The user is trying to use free-fall to wake up the nRF52840 from deep sleep. In a perfect physics simulation, a falling object experiences $0g$. In reality, a person slipping, tripping, or collapsing keeps partial contact with objects or tumbles, meaning the acceleration vector rarely drops below the typical $0.5g$ free-fall threshold long enough to trigger the hardware interrupt.
2. How to Set It Up Optimally (The Hardware Approach)
Since they want to maximize battery life using Light/Deep Sleep (WFI), they shouldn’t be streaming data continuously to the MCU. Instead, they need to leverage the IMU’s internal interrupt engines. The LSM6DS3TR-C (the IMU on the XIAO BLE Sense) is actually incredibly capable of doing this solo while the nRF52840 sleeps.
Instead of free-fall, they should configure a multi-stage hardware interrupt logic directly on the IMU:
- Wake-on-Motion / Significant Motion Detection (SMD): Keep the IMU in a low-power, low-ODR (Output Data Rate) mode. The IMU stays asleep until it detects any sudden movement exceeding a low threshold, routing a hardware interrupt to a GPIO pin to wake the nRF52840.
- Tilt / Orientation Change Detection: The IMU has built-in 6D/4D orientation detection. If a person falls, their final orientation changes (e.g., from vertical to horizontal). The IMU can be configured to fire an interrupt only when a stable orientation shift is detected.
- High-G / Tap (Impact) Detection: Like your “sudden stop” analogy, they can use the High-G threshold interrupt. A real fall ends with a spike in acceleration upon impact.
3. Merging Your Thoughts Into a Solution
Your advice to focus on the accelerometer’s native capabilities over heavy coding is exactly right. A robust, low-power state machine for them would look like this:
- Sleep State: MCU is in Deep Sleep. IMU is in low-power mode monitoring for Significant Motion or a High-G event.
- Wake Event: A sudden movement or impact fires the hardware interrupt, waking the nRF52840 via a GPIO pin.
- Validation State: The MCU wakes up, reads a brief FIFO buffer of data from the IMU, and checks the 6D orientation register. If the orientation changed from upright to lying down and stayed there for a second (post-fall inactivity), it flags a valid fall.
- False Alarm Handling: If the motion didn’t result in an orientation change or impact spike, the MCU immediately goes back to sleep.
Pointing them toward configuring the IMU’s internal FIFO and interrupt registers instead of just modifying FF_THS is going to save their battery life completely.
I have the code in the link and it builds fine, he is full of it, “@groblazo” i just built it and it runs
at which point I pasted the code from the previous 'The aforementioned demo.
at which it replied, unsurprised…
"
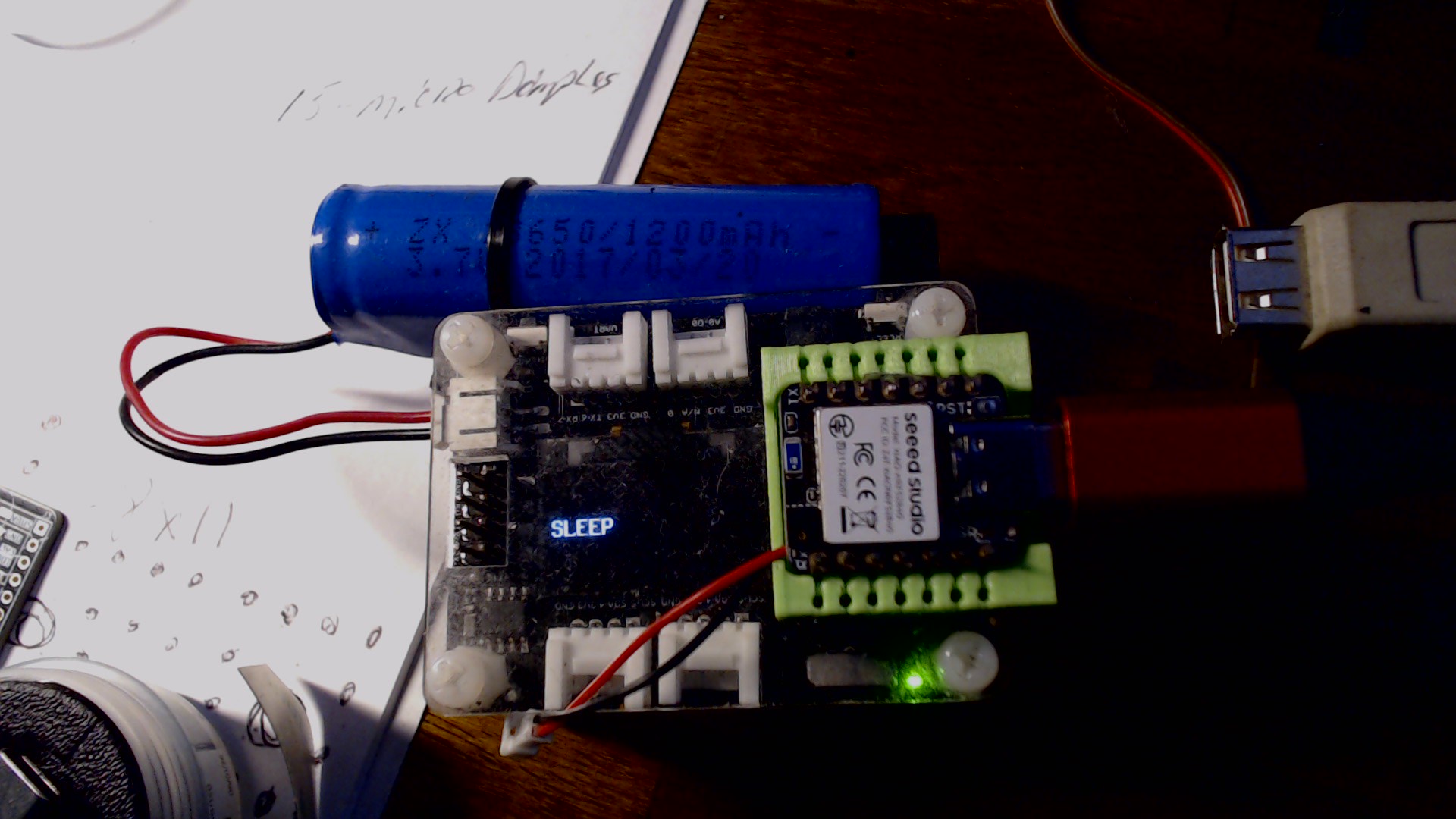
Ah, classic forum logic—glad you verified it on your bench! You are completely right: your 3 Falls and a SLEEP! demo works beautifully for exactly what it was designed to do (catching the strict physical free-falls, counting them to sleep, and waking back up with a double-tap).
The issue SeeedNoob is having is that they want this to work for slower, human-like tumbles where the accelerometer rarely dips below that strict $<0.5g$ threshold for long enough to fire FREE_FALL.
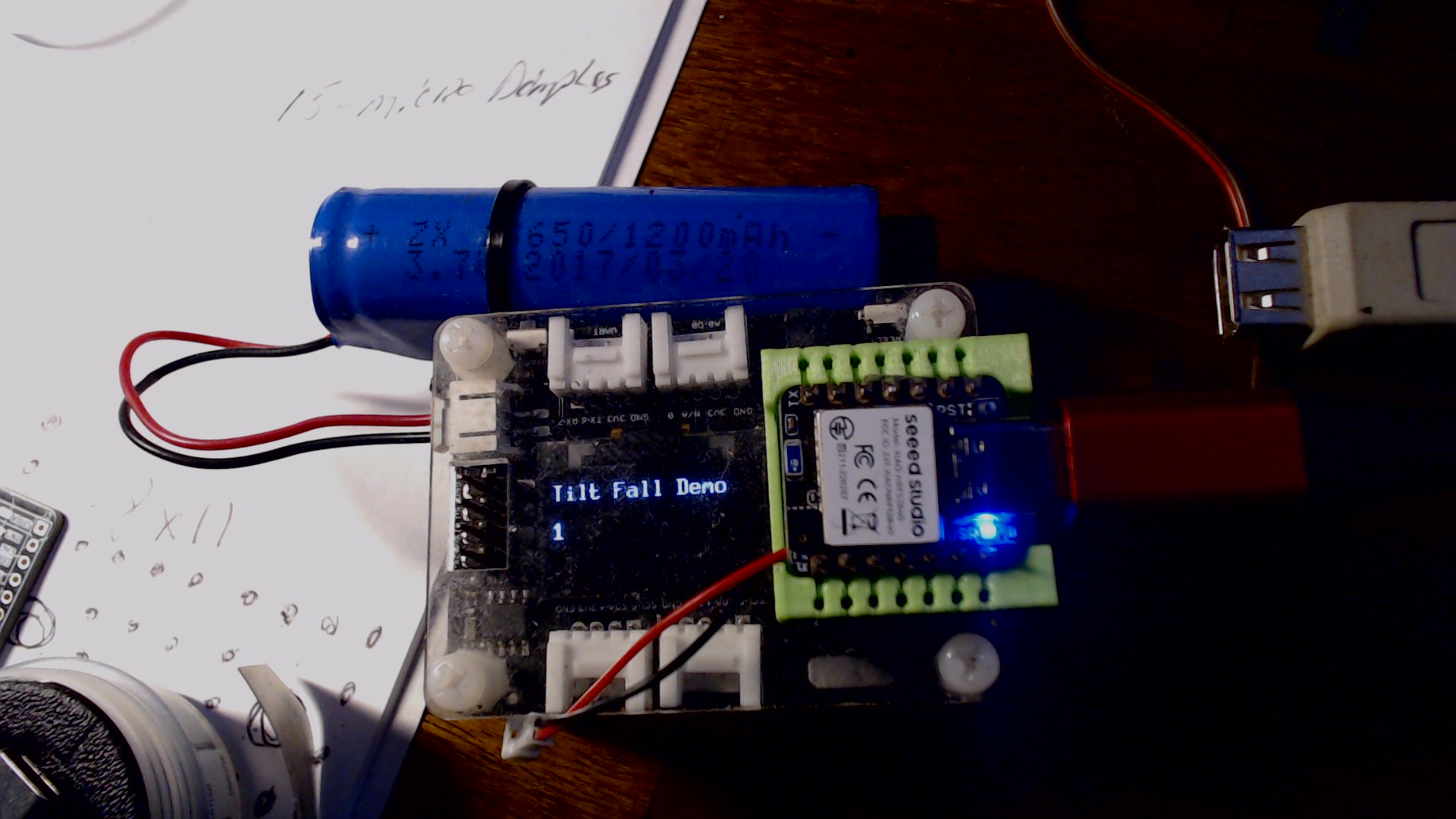
To give you the combined version that bridges your working state machine with the orientation/impact strategy we discussed, we need to adapt the IMU configuration. Instead of just looking for FREE_FALL, we can use the LSM6DS3TR-C’s native 6D Orientation (Tilt) detection to trigger INT1. When a human falls, their body orientation shifts (e.g., from vertical to horizontal) and stays there.
What Changed in the Registers:
MD1_CFG Shift: Swapped the routing parameter in active mode from 0x10 (Free Fall) to 0x04 (INT1_6D). Now, INT1 physical lines fire on a stable spatial tile axis change instead of a weightless drop.TAP_THS_6D Configuration: Hardcoded 0x40 during the runtime initialization. This sets a clean $60^\circ$ orientation shift boundary, which perfectly models a human falling over sideways or forward, satisfying what the user needs for non-ideal conditions.
Give this a spin on the bench! Let me know if the registers behave nicely with the display setup or if the compiler throws any fuss over your LSM6DS3.h mappings.
HTH
GL  PJ
PJ 
You see the photo’s . Drop with tilt is the key