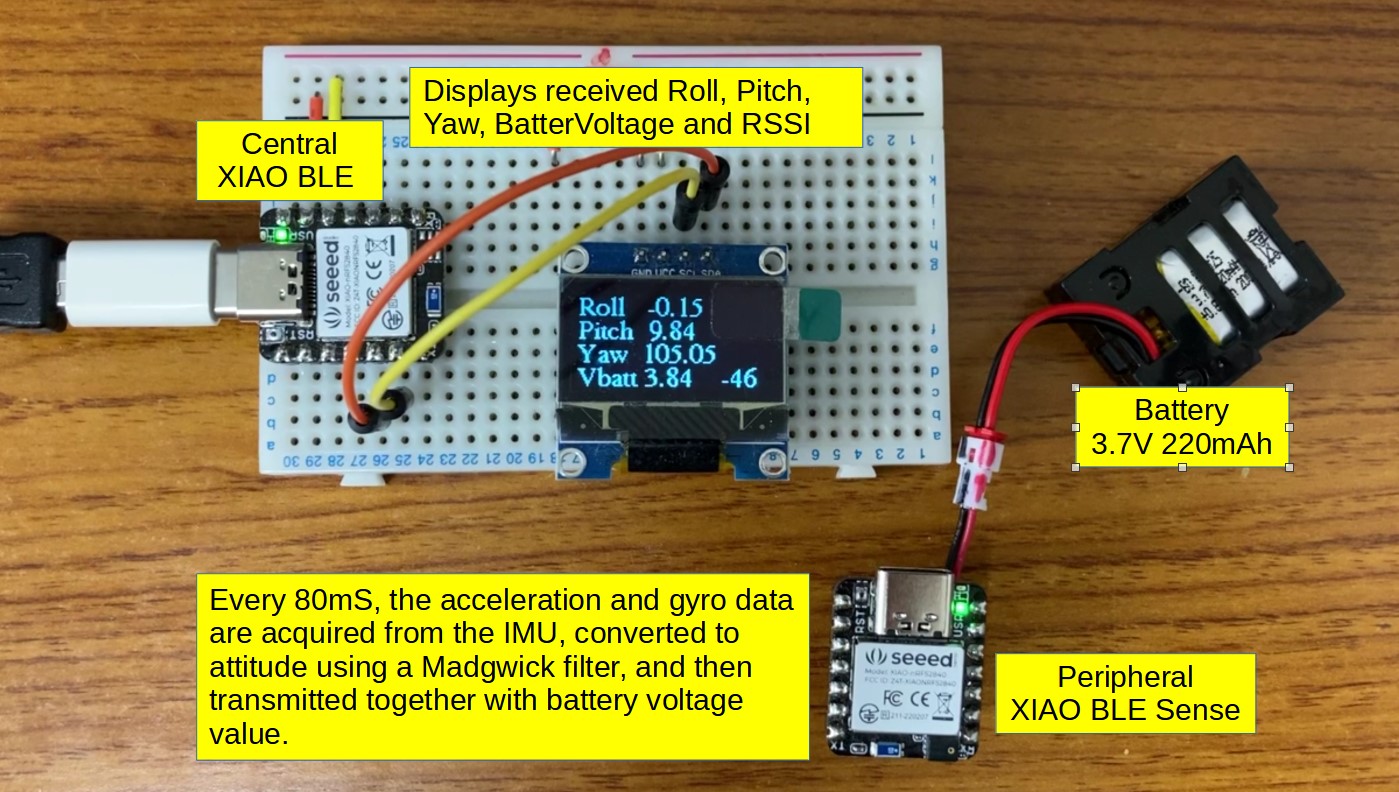
For my BLE programming practice, I made a project to send attitude data from a battery-powered peripheral:XIAO_BLE_Sense to a central:XIAO_BLE for monitering.The board library is mbed 2.7.2.
It was difficult to find a sample that could be used directly, but the example in the following link was used as a reference.
I used the following libraries.
ArduinoBLE 1.3.2 by Arduino
Seeed Arduino LSM6DS3 2.0.3 by Seeed Studio
Madgwick 1.2.0 by Arduino
Adafruit GFX Library 1.10.14 by Adafruit
Adafruit SSD1306 2.5.3 by Adafruit
So far, it is working as expected with no problems, but this is my first time using BLE and I am not sure if my code is appropriate. If there is anything wrong with BLE code, please advise.
XIAO_BLE_mbed_Attitude_Monitor.zip (5.5 KB)
Peripheral XIAO BLE Sence
//----------------------------------------------------------------------------------------------
// Board Library : Seeed nRF52 mbed-enabled Borads 2.7.2
// Board Select : Seeed nRF52 mbed-enabled Borads / Seeed XIAO BLE Sense - nRF52840
// 2022/10/07
//----------------------------------------------------------------------------------------------
// Modification required for battery voltage reading
// /Arduino15/packages/Seeeduino/hardware/mbed/2.7.2/cores/arduino/pinDefinitions.h:22
// #define analogPinToPinName(P)
// g_APinDescription ---> g_AAnalogPinDescription
// https://forum.seeedstudio.com/t/xiao-ble-sense-mbed-2-7-2-battery-charge-and-voltage-monitor-analogread-p0-31-does-not-work/266438
//**********************************************************************************************
#include <Wire.h>
#include <ArduinoBLE.h> // ArduinoBLE 1.3.2 by Arduino
#include <MadgwickAHRS.h> // Madgwick 1.2.0 by Arduino
#include <LSM6DS3.h> // Seeed Arduino LSM6DS3 2.0.3 by Seeed Studio
#define AVENUM 32 // average number of ADC
#define HICHG P0_13 // charge current setting pin Open:50mA Lo:100mA
#define CHG P0_17 // charge indicator pin Open:discharge Lo:charge(LED ON)
#define VBAT_ENABLE P0_14 // battery vontage read enable Open:disable Lo:enable
#define VBAT_READ P0_31 // battery voltage monitor pin
#define VBAT_LOWER 3.5 // battery voltage lower limit
#define VBAT_UPPER 4.2 // battery voltage upper limit
#define dataNum 8 //send data number : rolll, pitch, yaw, Vbatt (4 data 8 byte)
LSM6DS3 myIMU(I2C_MODE, 0x6A); // IMU
Madgwick filter; // Madgwick filter
const char* versionNumber = "0.90"; // version number
float ax, ay, az; // Accel
float gx, gy, gz; // Gyro
float Vbatt; // battery voltage
float roll, pitch, yaw; // attitude
uint8_t readData; // for reading IMU register
uint32_t timestamp; // for delay function
bool LED_state; // LED ON/OFF state
union unionData { //Union for bit convertion 16 <--> 8
int16_t dataBuff16[dataNum/2];
uint8_t dataBuff8[dataNum];
};
union unionData ud;
//generated Linux command uuidgen "0dd7eb5a-a8b9-4f45-bcd7-94c674c3b25f"
#define myUUID(val) ("0dd7eb5a-" val "-4f45-bcd7-94c674c3b25f")
BLEService AttService(myUUID("0000"));
BLECharacteristic dataCharacteristic(myUUID("0010"), BLERead | BLENotify, dataNum);
void setup() {
//initialize serial port
Serial.begin(115200);
// while (!Serial) { delay(1); }
//set I/O pins
pinMode(LED_RED, OUTPUT); // LOW:LED ON, HIGH:LED OFF
pinMode(LED_GREEN, OUTPUT);
pinMode(HICHG, OUTPUT);
pinMode(CHG, INPUT);
pinMode(VBAT_ENABLE, OUTPUT);
pinMode(VBAT_READ, INPUT);
digitalWrite(LED_RED, HIGH);
digitalWrite(LED_GREEN, HIGH);
digitalWrite(HICHG, LOW); // charge current 100mA
digitalWrite(VBAT_ENABLE, LOW); // battery voltage read enable
// initialize ADC 2.4V/4096
analogReference(AR_INTERNAL2V4); // Vref=2.4V
analogAcquisitionTime(AT_10_US);
analogReadResolution(12); // 4096
// initialize and set IMU
// refer to LSM6D3.cpp:351
myIMU.settings.gyroRange = 2000; // calcGyro()
myIMU.settings.accelRange = 4; // calcAccel()
if (myIMU.begin() != 0) {
Serial.println("IMU Device error");
while(1);
}
Wire1.setClock(400000UL); //SCL 400kHz
// change defalt settings, refer to data sheet 9.13, 9.14, 9.19, 9.20
myIMU.writeRegister(LSM6DS3_ACC_GYRO_CTRL2_G, 0x1C); // 12.5Hz 2000dps
myIMU.writeRegister(LSM6DS3_ACC_GYRO_CTRL1_XL, 0x1A); // 12.5Hz 4G
myIMU.writeRegister(LSM6DS3_ACC_GYRO_CTRL7_G, 0x00); // HPF 16mHz
myIMU.writeRegister(LSM6DS3_ACC_GYRO_CTRL8_XL, 0x09); // ODR/4
// Maadgwick filter sampling rate
filter.begin(12.5);
// initialize BLE
if (!BLE.begin()) {
Serial.println("starting BLE module failed!");
while (1);
}
// set the local name
BLE.setLocalName("Att_Monitor");
// set the device name
BLE.setDeviceName("XIAO nRF52840 Sence");
// set the UUID for the service
BLE.setAdvertisedService(AttService);
// add the characteristic to the service
AttService.addCharacteristic(dataCharacteristic);
// add service
BLE.addService(AttService);
// start advertising
BLE.setAdvertisingInterval(160); //0.625mS * 160 = 100mS
BLE.setConnectionInterval(6, 3200); //1.25mS * 6 = 7.5mS, 1.25mS * 3200 = 4S
BLE.advertise();
}
void loop() {
// connect the sentral
Serial.println("Connecting to Central ........");
BLEDevice central = BLE.central();
if (central) { // connected to Central?
// while connected Central
Serial.println("Connected Central");
while(central.connect()) {
LED_state = !LED_state;
digitalWrite(LED_GREEN, (LED_state ? LOW : HIGH)); // connect indicator blinking
// wait for IMU data to become valid
// sample rate is 12.5Hz, so can read every 80mS
do {
myIMU.readRegister(&readData, LSM6DS3_ACC_GYRO_STATUS_REG); //0,0,0,0,0,TDA,GDA,XLDA
} while ((readData & 0x07) != 0x07);
digitalWrite(LED_RED, LOW); // data read and send task indicator ON
ax = myIMU.readFloatAccelX(); // Accel data
ay = myIMU.readFloatAccelY();
az = myIMU.readFloatAccelZ();
gx = myIMU.readFloatGyroX(); // Gyro data
gy = myIMU.readFloatGyroY();
gz = myIMU.readFloatGyroZ();
// calculate the attitude with Madgwick filter
filter.updateIMU(gx, gy, gz, ax, ay, az);
roll = filter.getRoll(); // -180 ~ 180deg
pitch = filter.getPitch(); // -180 ~ 180deg
yaw = filter.getYaw(); // 0 -3 60deg
// battery voltage averasing 32 averaging 1 ~ 6mS
int Vadc = 0;
for (int i = 0; i < AVENUM; i++) {
Vadc = Vadc + analogRead(VBAT_READ); // analogRead() 32uS
}
Vadc = Vadc / AVENUM;
Vbatt = 2.961 * 2.4 * Vadc / 4096 * 1.0196; // Vref=2.4, 1/attination=(510e3 + 1e6)/510e3=2.961
// correction=1.0196(option)
// convert float data to uint16_t data
ud.dataBuff16[0] = (roll * 32768) / 180;
ud.dataBuff16[1] = (pitch * 32768) / 180;
ud.dataBuff16[2] = (yaw * 32768) / 360;
ud.dataBuff16[3] = Vbatt * 1000;
// for Serial plotter 5~20mS
Serial.print(yaw);
Serial.print(" ");
Serial.print(pitch);
Serial.print(" ");
Serial.print(roll);
Serial.println();
// write to Characteristic as byte data
dataCharacteristic.writeValue(ud.dataBuff8, dataNum); // 40~100uS
digitalWrite(LED_RED, HIGH); // data read and send task indicator OFF
} //while connected
// if disconnected from Central
digitalWrite(LED_GREEN, HIGH); // connect indicator OFF
Serial.print("Disconnected from central: ");
Serial.println(central.address());
} //if connect
} //loop()
Central XIAO BLE
//----------------------------------------------------------------------------------------------
//Board Library : Seeed nRF52 mbed-enable Borads 2.7.2
//Board Select : Seeed nRF52 mbed-enable Borads / Seeed XIAO BLE - nRF52840
//2022/10/08
//----------------------------------------------------------------------------------------------
#include <Wire.h>
#include <Adafruit_GFX.h> // Adafruit GFX Library 1.10.14 by Adafruit
#include "Fonts/FreeSans9pt7b.h"
#include "Fonts/FreeSerif9pt7b.h"
#include <Adafruit_SSD1306.h> // Adafruit SSD1306 2.5.3 by Adafruit
#include <ArduinoBLE.h> // ArduinoBLE 1.3.2 by Arduino
#define VBAT_LOWER 3.5 // battery voltage lower limit
#define VBAT_UPPER 4.2 // battery voltage upper limit
#define dataNum 8 // receive data number : roll, pitch, yaw, Vbatt (4 data 8 byte)
Adafruit_SSD1306 display(128, 64, &Wire, -1); //SSD1306
const char* versionNumber = "0.90"; // version number
float roll, pitch, yaw; // attitude
float Vbatt; // battery voltage
int ss; // peripheral signal strength
bool readingFlag = false; // data buffer in use flag
int err; // error code of scan_connect function
bool LED_state; // LED ON/OFF state
union unionData { // Union for bit convertion 16 <--> 8
int16_t dataBuff16[dataNum/2];
uint8_t dataBuff8[dataNum];
};
union unionData ud;
// Characteristic UUID
#define myUUID(val) ("0dd7eb5a-" val "-4f45-bcd7-94c674c3b25f")
//BLEService AttService(myUUID("0000"));
BLECharacteristic dataCharacteristic(myUUID("0010"), BLEWrite | BLENotify, dataNum);
BLEDevice peripheral;
void setup()
{
//initialize serial port
Serial.begin(115200);
while (!Serial) { delay(1); }
//set I/O pins
pinMode(LED_RED, OUTPUT); // LOW:LED ON, HIGH:LED OFF
pinMode(LED_GREEN, OUTPUT);
digitalWrite(LED_RED, HIGH);
digitalWrite(LED_GREEN, HIGH);
// initialize SSD1306
if (!display.begin(SSD1306_SWITCHCAPVCC, 0x3C)) {
Serial.println("SSD1306 initialize error");
}
display.clearDisplay();
display.setFont(&FreeSerif9pt7b);
display.setTextColor(SSD1306_WHITE);
display.setCursor(0, 15);
display.println("ATT Monitor");
display.setCursor(0, 31);
display.println(" BLE Central");
display.setCursor(0, 47);
display.print("Ver : ");
display.println(versionNumber);
display.display();
delay(2000);
// initialize BLE
BLE.begin();
}
//******************************************************************************************
// IMU data is received every 80mS
//
void loop() {
// scan and connect the peripheral
// return value of this function is an error code
err = scan_connect();
// if connected?
if(err == 0) {
// main task while connected to the peripheral 60~78mS
while (peripheral.connected()) {
LED_state = !LED_state;
digitalWrite(LED_GREEN, (LED_state ? LOW : HIGH)); // connect indicator blinking
long timestamp = millis(); // for timer
// restoration of received data
// prohibit event handler access while data buffer is in use
readingFlag = true;
roll = ud.dataBuff16[0] * 180.0 / 32768.0;
pitch = ud.dataBuff16[1] * 180.0 / 32768.0;
yaw = ud.dataBuff16[2] * 360.0 / 32768.0;
Vbatt = ud.dataBuff16[3] / 1000.0;
readingFlag = false;
// for serial plotter
Serial.print(roll); Serial.print(", ");
Serial.print(pitch); Serial.print(", ");
Serial.println(yaw);
// display attitude, battery voltage, signal strength
display.clearDisplay();
display.setCursor(0, 15);
display.print("Roll "); display.println(roll);
display.setCursor(0, 31);
display.print("Pitch "); display.print(pitch);
display.setCursor(0, 47);
display.print("Yaw "); display.println(yaw);
display.setCursor(0, 63);
display.print("Vbatt "); display.print(Vbatt);
if(Vbatt < VBAT_LOWER) {
display.print("L");
}
display.setCursor(96, 63);
display.println(ss);
display.display();
while(millis() - timestamp < 80); // wait for loop time 80mS
} //While connected
} //if scan & connect
// if disconnected from the peripheral
digitalWrite(LED_GREEN, HIGH); // connect indicator OFF
Serial.print("Disconnected from the peripheral: ");
Serial.println(peripheral.address());
Serial.print("ERROR : "); // return value of scan_connect
Serial.println(err);
} //loop
//**************************************************************************************************
// scan and connect the peripheral
// return value of this function is an error code
//
int scan_connect(void) {
// scanning peripherals
BLE.scanForUuid(myUUID("0000"));
Serial.println("1.SCANNING ................");
peripheral = BLE.available();
if (!peripheral) {
Serial.println("2x.Peripheral unavailable");
return 2;
}
Serial.println("2.Peripheral is available");
if (peripheral.localName() != "Att_Monitor") {
Serial.println("3x.Peripheral local name miss match");
return 3;
}
Serial.println("3.Got the right peripheral");
// stop scanning, connect the peripheral
BLE.stopScan();
Serial.println("4.Stop scanning");
Serial.println("5.CONNECTING ................");
if (!peripheral.connect()) {
Serial.println("5x.Can't connect");
return 5;
}
Serial.println("5.Connected");
if (!peripheral.discoverAttributes()) {
Serial.println("6x.Didn't discover attributes");
peripheral.disconnect();
return 6;
}
Serial.println("6.Discovered attributes");
dataCharacteristic = peripheral.characteristic(myUUID("0010")); //dataCaracteristic UUID
dataCharacteristic.setEventHandler(BLEWritten, characteristicWritten); //BLEWritten handler
Serial.println("7.Char and eventhandler setting");
if (!dataCharacteristic.canSubscribe()) {
Serial.println("8x.Can't subscribe");
peripheral.disconnect();
return 8;
}
Serial.println("8.Can subscribe");
if (!dataCharacteristic.subscribe()) {
Serial.println("9x.Can't Subscribe");
peripheral.disconnect();
return 9;
}
Serial.println("9.Subscribed");
Serial.println("10.Success scanning and connecting");
return 0;
}
//****************************************************************************************************
// Characteristic written event handler
//
void characteristicWritten(BLEDevice peripheral, BLECharacteristic thisChar) {
digitalWrite(LED_RED, LOW); // event indicator ON
// wait while data buffer is accessed in main loop
while(readingFlag == true) {
}
dataCharacteristic.readValue(ud.dataBuff8, dataNum); // read data packet 3.5uS
ss = peripheral.rssi(); // read signal strength 5~20mS
long timestamp = millis();
while(millis() - timestamp <= 1); // Delay to make LED visible
digitalWrite(LED_RED, HIGH); // event indicator OFF
}