NEW Releasing: Grove AI HAT for Edge Computing and Look forward to your ideas!
The Sipeed MAIX-I module is the first RISC-V 64 AI module based on the powerful KPU K210. As a close partner of Sipeed, we are very excited to announce that we are going to make a Grove HAT for Raspberry Pi based on the Sipeed MAIX-I module, aiming at enabling more possibilities of AI model in areas such as predictive maintenance, anomaly detection, robotics and many more. Grove is a modular plug-and-play ecosystem that includes more than 200 different kinds of sensor, actuators, displays etc.
We are going to release two versions, one based on the Sipeed MAIX-I with WiFi and another without. Both can work as a Raspberry Pi HAT, or work by themselves. The basic function and features are confirmed and listed here. But we are open to suggestions from the community about how to make this product.
Grove AI HAT for Edge Computing without WiFi
Features
Core Module: Sipeed MAIX-1 with WiFi
Peripheral:
1 x LCD Interface
1 x Camera Interface
6 x Grove: 2 x Digital, 1 x I2C, 1 x UART, 2 x Analog
1 x UART Mode Switch
LED:
LED1: Reset
LED2: Boot/User
LED3: Power LED
Power:
1 x USB-C
Others:
Raspberry Pi form factor
12-Bit ADC
USB to UART chip
Grove AI HAT for Edge Computing with WiFi

Features
Core Module: Sipeed MAIX-1 with WiFi
Peripheral:
1 x LCD Interface
1 x Camera Interface
6 x Grove: 2 x Digital, 1 x I2C, 1 x UART, 2 x Analog
1 x UART Mode Switch
LED:
LED1: Reset
LED2: Boot/User
LED3: Power LED
Power:
1 x USB-C
Others:
Raspberry Pi form factor
WiFi Chip ESP8285 inside
12-Bit ADC
USB to UART chip
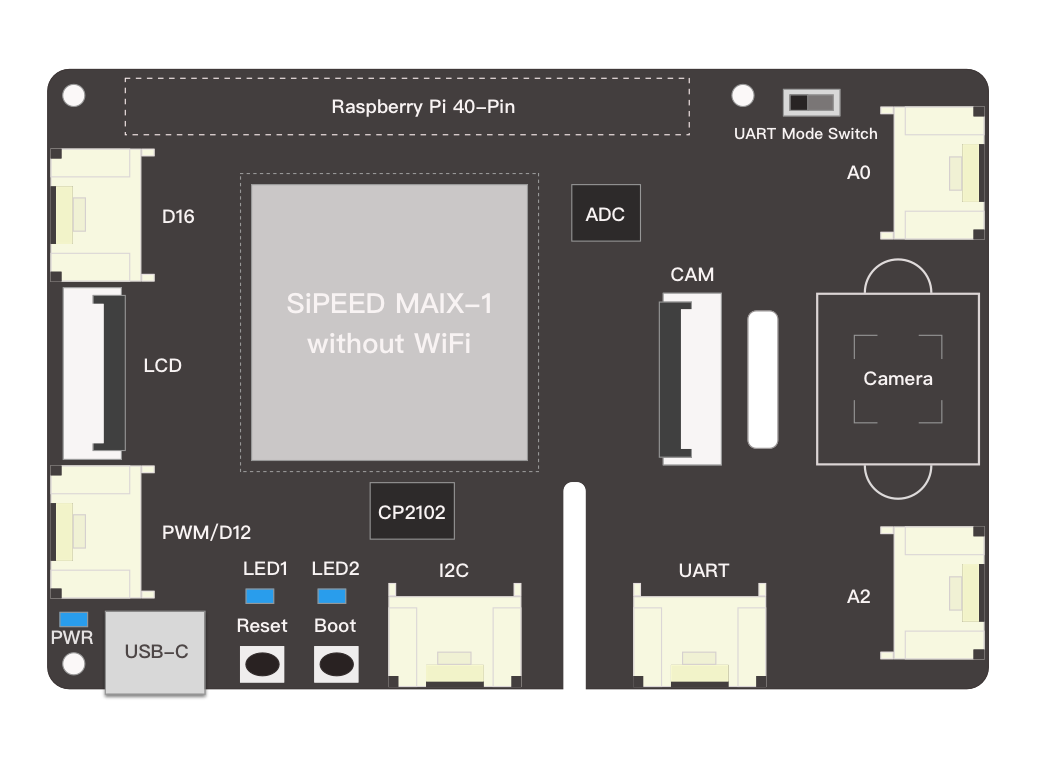
UPDATE: We just got the first look of this Grove AI HAT for Edge Computing and Raspberry Pi based on the Sipeed MAIX-I, including LCD and Camera Interfaces, connectors for Digital, I2C, UART and Analog.


So, don’t hesitate to share your thoughts and ideas with us in this forum! Check out the first look we have so far and let us know what features you would like to see and have the chance of making it to the final product. If your idea makes it to mass production, of course we will send you a free sample!!!
These products are designed for you and the rest of the community, so it only makes sense for us to listen to what you want for your next AI project.
Subscribe with us now! Don’t miss any updates for IoT news and new awesome product releasing!
UPDATE: We are going to release Grove HAT for Edge Computing next week for pre-order!
Finally we take suggestions in this forum by adding 3-Axis Digital Accelerometer, microphone and changing Raspberry Pi 40-Pin connector to SMT style. The USB Type-C port can directly power up Raspberry Pi. Boot Button can be set as user button.

I would love to see a SATA interface for either an SSD or a conventional hard drive.
I reckon that this would make a pretty awesome platform for introducing students to RISC-V, JTAG, and debugging.
Several ideas;
Raspberry Pi as a JTAG tool - please layout the Grove AI HAT PCB to connect the JTAG pins of the SiPEED MAIX-1 to suitable GPIO pins on the HAT connector so that the Raspberry Pi can be used as a JTAG tool. eg <LINK_TEXT text=“https://github.com/synthetos/PiOCD/wiki … TAG-Dongle”>https://github.com/synthetos/PiOCD/wiki/Using-a-Raspberry-Pi-as-a-JTAG-Dongle</LINK_TEXT>
SPI comms with the Raspberry Pi - please layout the Grove AI HAT PCB so that a Raspberry Pi SPI master on the HAT connector (Raspberry Pi is only an SPI master) can talk to an SPI slave on the SiPEED MAIX-1 (SPI much faster than UART…). However, unlike the K210, the Raspberry Pi doesn’t have a full FPIOA, so you will have to accommodate its limited choice of HAT pin functions when you layout the Grove AI HAT PCB - only some HAT pins can be used for SPI etc.
Power sharing - please tie the +5Vdc plane on the Grove AI Hat PCB to the +5Vdc pins on the Raspberry Pi HAT connector. Depending on current draw, this will allow both the Raspberry Pi and the HAT to be powered from a single power supply connection (one cable instead of two!)
SATA interface is interesting…however for the basic and medium projects, SD card would be enough with smaller space requirement. If there is needed for SSD, an USB to SATA adapter would be more convenient.
A connector for a battery pack would be great! So the battery pack could power both the HAT and the Pi itself.
A microphone could be useful.
Make it a real edge device by including LoRaWAN.
Awesome stuff! I suggest to put at least a couple more Grove connector sockets on the board, there seems to be enough room left. This would allow to connect several additional Grove sensors (there are many for about anything), which could be used as additional input to ML models and allow to do sensor fusion projects (because using AI for camera only is somewhat limiting). Grove actuators can be hooked up as well to sockets (relays, motor controller, etc… there are a lot of Grove accessories) and can for example be controlled from the output of a ML model; this is easy to do. I suggest to put the additional Grove sockets vertically, just like on the Seeeduino Lotus board instead of lining them up at the edge of the PCB. You could probably have 4 analog and 4 digital ports, instead of 2.
This looks amazing with a lot of possibilities! If we are using it with Raspberry Pi, we do not need wifi, bluetooth, sd card module but of course as a standalone unit we might need it. I was working on the “Recognition of Activities of Daily Lives (ADL)” and there was requirement for a 3-axis accelerometer. The problem is: if we use 3-axis accelerometer grove module, for better result it should be mounted parallel to the board. It would be very helpful to add a 3-axis accelerometer on the board itself which I think would not take much space. It will be beneficial for other use cases like auto-rotate lcd screen, free fall detection (to save data before it crashes!), almost all robotics projects (auto driving) needs it. I am eager to try it out soon!
Awesome!
Would be nice to have some basic sensors on the board. Something most commonly used for Machine learning.
You already have camera. Nice.
Ideas to add:
- Motion sensors (3 axis accelerometer at minimum, additional 3 axis gyro would be good. 3 axis magnetometer is a nice plus)
- One microphone
- Connector for Sipeed 6+1 Microphone Array
It seems there isn’t enough space for LoRaWAN…a LoRaWAN HAT could be more handy.
Thanks for the suggestion, will add a microphone in the next version~~
Thanks for the suggestion. From the current layout, there isn’t much space for extra 4 grove ports…We need also try to make the look of the board more harmonious, maybe we can make those horizontal ports become vertical too, thus can make more room for extra Groves, will try~~
Really appreciate your idea, in fact, we have already connected the power on the AI HAT on the Raspberry Pi HAT connector, in order to protect the circuit, we also add a switch to change the power mode.
For SPI connector and JTAG, we will evaluate and try to add them in the final version. Will get you updated~Thank you!
An RTC can be useful.
Is there any USER defined button?
Thanks for the suggestion, a 3-axis accelerometer sensor integrated on the board is surely more convenient than using Grove. Will try to find a cost-effective one so that not adding too much cost for our users, do you have any recommendation for the 3-Axis accelerometer sensor?
Thanks for the suggestion. Seems microphone and motions sensors are very demanded. Will possibly adding a 3-axis accelerometer instead of 9-DOF because 9-DOF will cost a lot more. For 3-Axis gyro and 3-Axis magnetometer, a Grove module can be handy.
RTC requires space…we can also use Grove - RTChttps://www.seeedstudio.com/Grove-RTC-p-758.html, or Pi RTC HAThttps://www.seeedstudio.com/Pi-RTC-DS1307-p-3213.html.