Dear all,
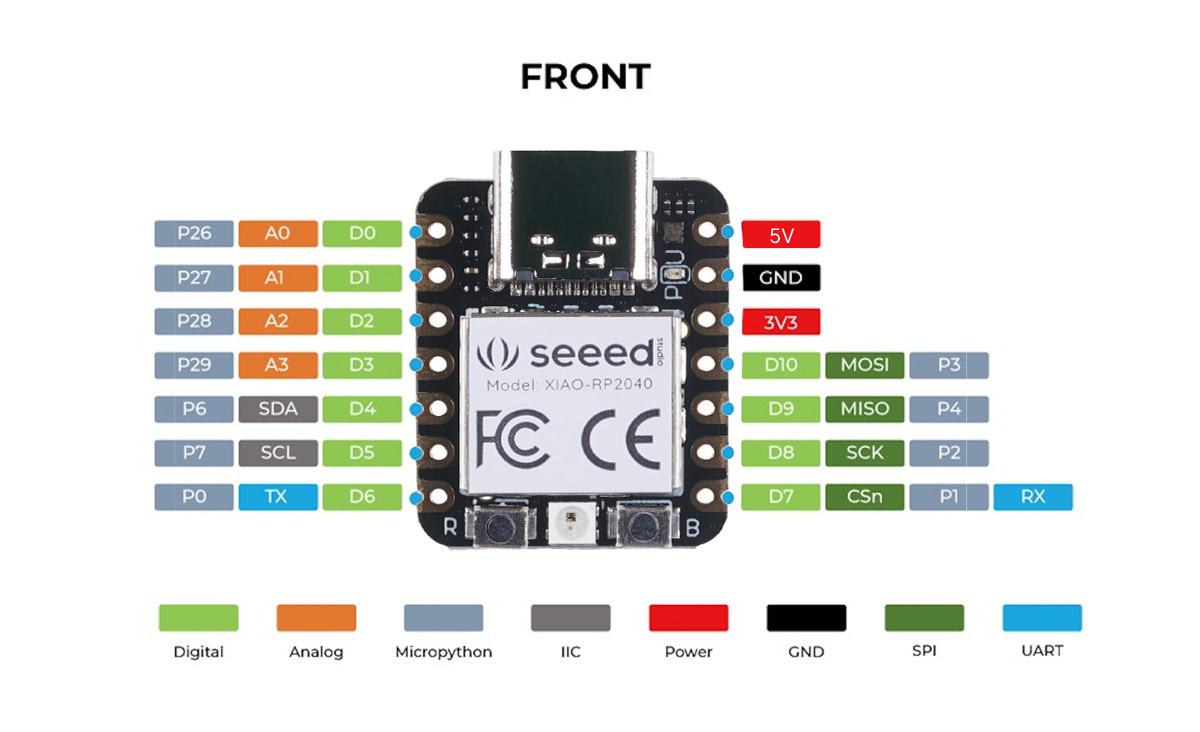
I am experiencing a problem with the following code that is supposed to read the status values of the endpoints. However, the read values never change. Ruling out errors in the circuit, could there be problems in the code? Specifically, I have jumpered pin 9 with 3.3V, but the reading in the loop always reports the pin value as “low.”
Thanks in advance.
#include <stdio.h>
#include "pico/stdlib.h"
#include <string.h>
// Define motor control pins
#define enPinX 0 // Enable pin for axis X
#define stpPinX 1 // Step pin for axis X
#define dirPinX 2 // Direction pin for axis X
#define enPinY 3 // Enable pin for axis Y
#define stpPinY 4 // Step pin for axis Y
#define dirPinY 5 // Direction pin for axis Y
// Definisci i pin per i fine corsa
#define limitSwitchXMin 8 // Fine corsa per la posizione minima dell'asse X
#define limitSwitchXMax 9 // Fine corsa per la posizione massima dell'asse X
// Funzione per inviare una risposta via USB
void sendResponse(const char* response) {
printf("%s", response); // Invia la stringa di risposta via USB
}
int main() {
stdio_init_all(); // Inizializza stdio per USB
// Enable motor pins as outputs
gpio_init(enPinX);
gpio_init(stpPinX);
gpio_init(dirPinX);
gpio_init(enPinY);
gpio_init(stpPinY);
gpio_init(dirPinY);
gpio_set_dir(enPinX, GPIO_OUT);
gpio_set_dir(stpPinX, GPIO_OUT);
gpio_set_dir(dirPinX, GPIO_OUT);
gpio_set_dir(enPinY, GPIO_OUT);
gpio_set_dir(stpPinY, GPIO_OUT);
gpio_set_dir(dirPinY, GPIO_OUT);
// Initialize limit switch pins as inputs
gpio_init(limitSwitchXMin);
gpio_init(limitSwitchXMax);
sleep_ms(100);
gpio_set_dir(limitSwitchXMin, GPIO_IN);
gpio_set_dir(limitSwitchXMax, GPIO_IN);
sleep_ms(100);
// Disable motors initially
gpio_put(enPinX, 0);
gpio_put(enPinY, 0);
gpio_put(stpPinX, 0);
gpio_put(stpPinY, 0);
char buffer[100];
int index = 0;
while (1)
{
// Leggi lo stato dei fine corsa
int minState = gpio_get(limitSwitchXMin); // Leggi il valore del fine corsa minimo
int maxState = gpio_get(limitSwitchXMax); // Leggi il valore del fine corsa massimo
// Invia i valori letti come stringhe
sendResponse("\n\n");
sendResponse("Valore fine corsa minimo: ");
sendResponse(minState ? "1\n" : "0\n"); // Invia 1 se attivato, altrimenti 0
sendResponse("Valore fine corsa massimo: ");
sendResponse(maxState ? "1\n" : "0\n"); // Invia 1 se attivato, altrimenti 0
sendResponse("\n\n");
sleep_ms(100); // Aspetta 1 secondo prima della prossima lettura
}
}