I have done all of steps like Motion Recognition based on Edge Impulse - Seeed Wiki (seeedstudio.com)
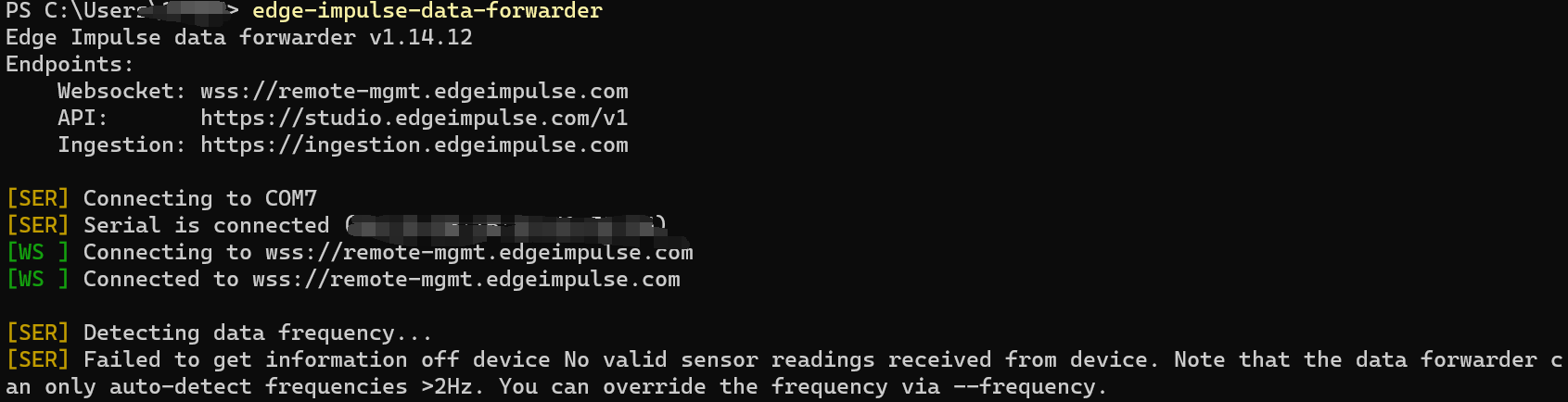
,But I missed a problem. It didn’t run correctly like this
Please help me, thank you!
I have done all of steps like Motion Recognition based on Edge Impulse - Seeed Wiki (seeedstudio.com)
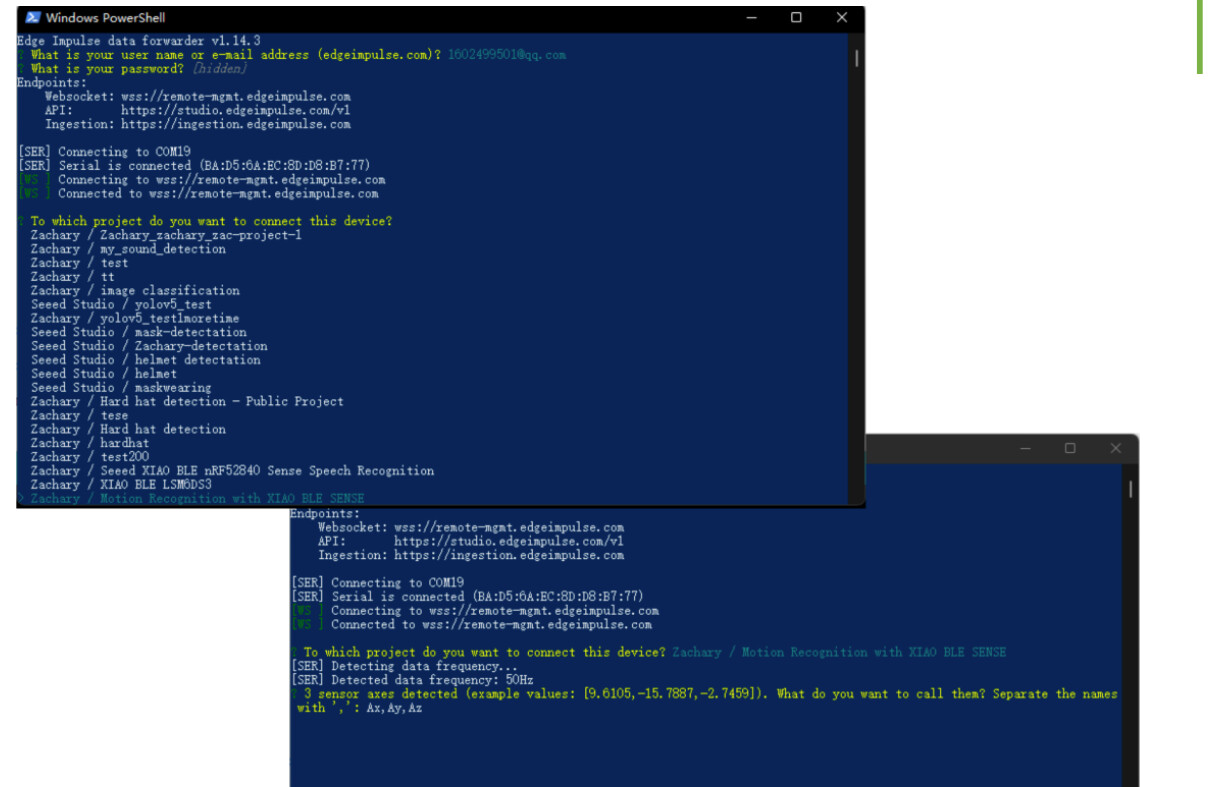
After I run this on Arduino IDE,my problem was soluted.
#include "LSM6DS3.h"
#include "Wire.h"
//Create a instance of class LSM6DS3
LSM6DS3 myIMU(I2C_MODE, 0x6A); //I2C device address 0x6A
#define CONVERT_G_TO_MS2 9.80665f
#define FREQUENCY_HZ 50
#define INTERVAL_MS (1000 / (FREQUENCY_HZ + 1))
static unsigned long last_interval_ms = 0;
void setup() {
// put your setup code here, to run once:
Serial.begin(115200);
while (!Serial);
//Call .begin() to configure the IMUs
if (myIMU.begin() != 0) {
Serial.println("Device error");
} else {
Serial.println("Device OK!");
}
}
void loop() {
if (millis() > last_interval_ms + INTERVAL_MS) {
last_interval_ms = millis();
Serial.print(myIMU.readFloatGyroX() * CONVERT_G_TO_MS2,4);
Serial.print('\t');
Serial.print(myIMU.readFloatGyroY() * CONVERT_G_TO_MS2,4);
Serial.print('\t');
Serial.println(myIMU.readFloatGyroZ() * CONVERT_G_TO_MS2,4);
}
}