Hello everyone,
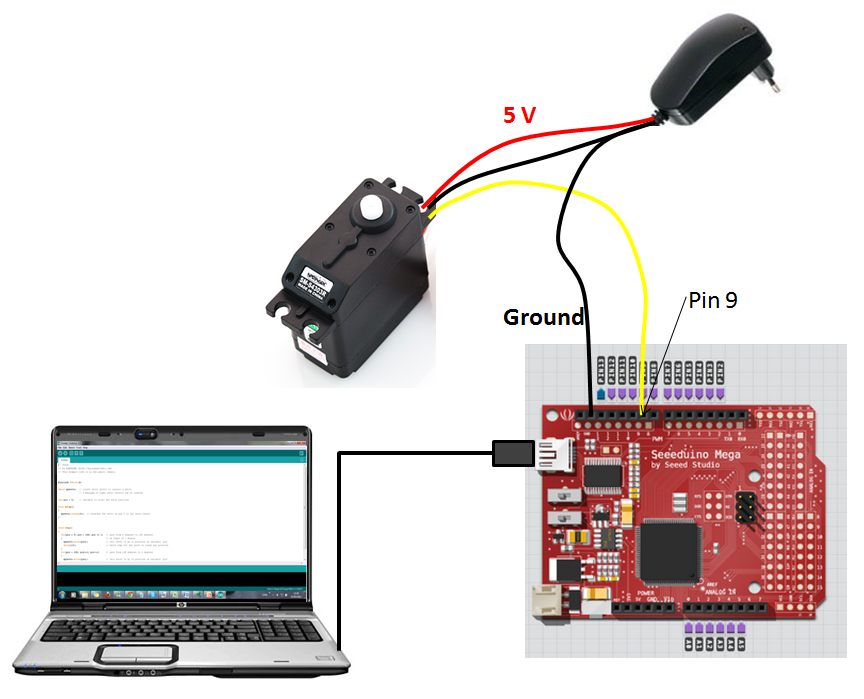
I have got a problem. I have a seeeduino Mega boar and I want to run a servomotor (described as follow sparkfun.com/datasheets/Robo … -360_e.pdf).
You can see the connection on the attached document.
I uploaded this following routine with Arduino software:
// Sweep
// by BARRAGAN http://barraganstudio.com
// This example code is in the public domain.
#include <Servo.h>
Servo myservo; // create servo object to control a servo
// a maximum of eight servo objects can be created
int pos = 0; // variable to store the servo position
void setup()
{
myservo.attach(9); // attaches the servo on pin 9 to the servo object
}
void loop()
{
for(pos = 0; pos < 180; pos += 1) // goes from 0 degrees to 180 degrees
{ // in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable ‘pos’
delay(15); // waits 15ms for the servo to reach the position
}
for(pos = 180; pos>=1; pos-=1) // goes from 180 degrees to 0 degrees
{
myservo.write(pos); // tell servo to go to position in variable ‘pos’
delay(15); // waits 15ms for the servo to reach the position
}
}
The problem is that the servo turns continually and do not execute the routine. There is a problem in my connection? Why it does not work properly?
Thank you.