Hi,
I’m going to build a robot based on the Mecanum wheel chassis from the store. Could you point to any plans and/or products that I would need next to the chassis? I’m inclined to slowly build it out - first, make sure it runs using a Seeduino board and some motor shields (any recommendations) and a remote (again looking for recommendations) and then slowly add more features using pi, camera, ultrasonic to add obstacle avoidance, line-following, etc.
Also looking for recommendations regarding the type of battery to use with the chassis.
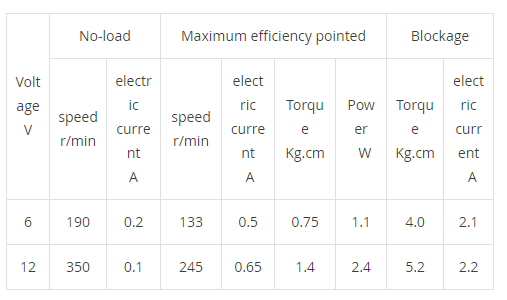
Since the Maximum Voltage Ampere rating is 12v/2.2A, you can go with L298 based motor drivers which can handle power supply: +5V~+46V and Driver up to 2A.