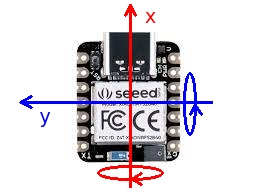
I’m getting x-axis and z-axis rotation values (float) that are around 0.4 while there is no motion but the y-axis rotation value is around -2.8. I thought it was measuring the rotation of the Earth at first but regardless of how the Seeeduino nRF52840 Sense is oriented, if there is no motion the value hovers around -3. When there is motion, it appears to detect rotation around the y-axis correctly.
I’m going to assume the values returned by IMU.readRaw or IMU.readFloat need to be corrected by applying a calibration offset (Eg: +2.8 to the y-axis rotation in my case) in order to get a corrected value.
My question is whether anyone else is seeing acceleration or rotation values that are slightly off from what they would expect to see.