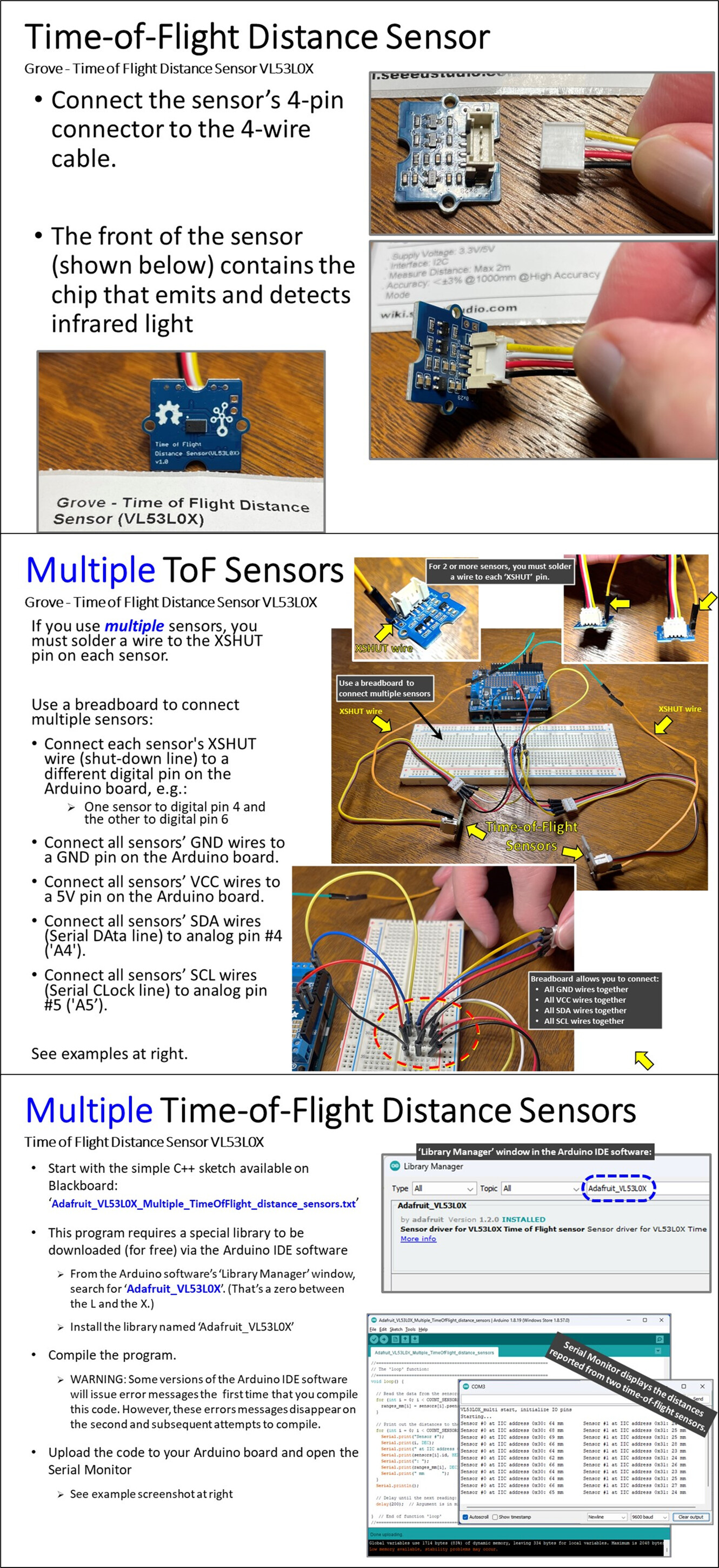
Thanks for the video. Yes, I had seen videos like this one. I indeed have had to change to a different library (instead of Seeed Studio’s library) in order to change the IIC address on my Grove VL53L0X distance sensors. In retrospect, it makes sense that Seeed Studio’s library does not allow users to change the IIC address because it’s made for the Grove VL53L0X sensor, whose XSHUT pin is not wired out (unless the user solders a wire to the board, as shown below).
For reference, I’ve included the Arduino C++ sketch I now use to accomplish what I wanted. This, and the images below, were prepared for the freshman/sophomore college engineering students I teach.
Below is the C++ program I used to run two Grove VL53L0X sensors to measure distances:
/*
* This code was developed from the example code obtained via the Arduino IDE for the
* Grove Time-of-Flight Distance Sensor VL53L0X.
*
***************************************************************************************
** WARNING: Some versions of the Arduino IDE software will issue error messages the **
** first time that you compile this code. However, these errors messages **
** disappear on the second and subsequent attempts to compile. **
***************************************************************************************
*
* Wiring:
* If you are connecting the distance-sensor directly to an Arduino Uno board, then:
* Connect all sensors' GND wires to a GND pin on the Arduino board
* Connect all sensors' VCC wires to a 5V pin.
* Connect all sensors' SDA wires (Serial DAta line) to analog pin #4 ('A4').
* Connect all sensors' SCL wire (Serial CLock line) to analog pin #5 ('A5').
* Connect each sensor's XSHUT wire (shut-down line) to a different digital pin
* on the Arduino board.
*
* Alternatively, the sensors' SDA and SCL wires may be connected to the unlabeled
* pins beside the AREF pin on the Arduino Uno board. The sensors' SDA wires connect
* to the pin immediately beside the AREF pin. The sensors' SCL wires connect to the
* next pin, at the edge of the connector.
*
* If you are wiring the distance-sensors to a Motor Shield board, then follow the
* same instructions as the above. (Note that the SDA and SCL pins have better labels
* on the Motor Shield board than on the Arduino Uno board.)
*/
// Include the 'Wire.h' libary to allow the Arduino to communicate with the time-of-flight sensors of the 'IIC' bus
#include <Wire.h>
// Include the 'Adafruit_VL53L0X' libary for the VL53L0X time-of-flight distance sensors
#include <Adafruit_VL53L0X.h>
// Create a 'Adafruit_VL53L0X' object for each sensor:
Adafruit_VL53L0X sensor1;
Adafruit_VL53L0X sensor2;
//====================================================================
// Define global variables for the sensors:
//====================================================================
typedef struct {
Adafruit_VL53L0X *psensor; // pointer to object
TwoWire *pwire;
int id; // IIC id number for the sensor
int shutdown_pin; // which pin for shutdown;
int interrupt_pin; // which pin to use for interrupts.
Adafruit_VL53L0X::VL53L0X_Sense_config_t sensor_config; // options for how to use the sensor
uint16_t range; // range value used in continuous mode stuff.
uint8_t sensor_status; // status from last ranging in continuous.
} sensorList_t;
// Setup for 2 sensors by defining information for each sensor in a 'sensors' array. Include
// a separate line of information for each sensor
sensorList_t sensors[] = {
// For 'sensor1', define the IIC accress as hexadecimal value 0x30. Assign digital pin #4 to this
// sensor's XSHUT pin (shut-down pin). Assign digital pin #5 to the sensor's INTERRUPT pin.
{&sensor1, &Wire, 0x30, 4, 5, Adafruit_VL53L0X::VL53L0X_SENSE_DEFAULT, 0, 0},
// For 'sensor2', define the IIC accress as hexadecimal value 0x31. Assign digital pin #6 to this
// sensor's XSHUT pin (shut-down pin). Assign digital pin #7 to the sensor's INTERRUPT pin.
{&sensor2, &Wire, 0x31, 6, 7, Adafruit_VL53L0X::VL53L0X_SENSE_DEFAULT, 0, 0}
};
// Calculate the number of sensors by checking the size of the above 'sensors' array:
const int COUNT_SENSORS = sizeof(sensors) / sizeof(sensors[0]);
// Create array-variable for the sensors' range (in mm):
uint16_t ranges_mm[COUNT_SENSORS];
//====================================================================
// The 'Initialize_sensors' function:
//====================================================================
/*
Reset all sensors by setting all of their XSHUT pins low for delay(10), then
set all XSHUT high to bring out of reset. Keep sensor #1 awake by keeping XSHUT
pin high. Put all other sensors into shutdown by pulling XSHUT pins low.
Initialize sensor #1 with lox.begin(new_i2c_address). Pick any number except
0x29 and it must be under 0x7F. Going with 0x30 to 0x3F is probably OK.
Keep sensor #1 awake, and now bring sensor #2 out of reset by setting its
XSHUT pin high. Initialize sensor #2 with lox.begin(new_i2c_address) Pick any
number but 0x29 and whatever you set the first sensor to.
*/
void Initialize_sensors() {
bool found_any_sensors = false;
// Set all shutdown pins low to shutdown sensors
for (int i = 0; i < COUNT_SENSORS; i++)
digitalWrite(sensors[i].shutdown_pin, LOW);
delay(10);
for (int i = 0; i < COUNT_SENSORS; i++) {
// one by one enable sensors and set their ID
digitalWrite(sensors[i].shutdown_pin, HIGH);
delay(10); // give time to wake up.
if (sensors[i].psensor->begin(sensors[i].id, false, sensors[i].pwire,
sensors[i].sensor_config)) {
found_any_sensors = true;
} else {
Serial.print(i, DEC);
Serial.print(F(": c to start\n"));
}
}
if (!found_any_sensors) {
Serial.println("No valid sensors found");
while (1)
;
}
} // End of function 'Initialize_sensors'
//====================================================================
// The 'setup' function:
//====================================================================
void setup() {
// Start the serial monitor at 9600 baud rate:
Serial.begin(9600);
// Start the IIC bus:
Wire.begin();
// Wait until serial port opens ... For 5 seconds max
while (!Serial && (millis() < 5000))
;
// Initialize all of the pins.
Serial.println(F("VL53LOX_multi start, initialize IO pins"));
for (int i = 0; i < COUNT_SENSORS; i++) {
pinMode(sensors[i].shutdown_pin, OUTPUT);
digitalWrite(sensors[i].shutdown_pin, LOW);
if (sensors[i].interrupt_pin >= 0)
pinMode(sensors[i].interrupt_pin, INPUT_PULLUP);
}
Serial.println(F("Starting..."));
Initialize_sensors();
} // End of function 'setup'
//====================================================================
// The 'loop' function:
//====================================================================
void loop() {
// Read the data from the sensors using a 'for' loop:
for (int i = 0; i < COUNT_SENSORS; i++) {
ranges_mm[i] = sensors[i].psensor->readRange(); // This is where the sensor's data is captured
}
// Print out the distances to the serial monitor, again using a 'for' loop:
for (int i = 0; i < COUNT_SENSORS; i++) {
Serial.print("Sensor #");
Serial.print(i, DEC);
Serial.print(" at IIC address 0x");
Serial.print(sensors[i].id, HEX);
Serial.print(": ");
Serial.print(ranges_mm[i], DEC);
Serial.print(" mm ");
}
Serial.println();
// Delay until the next reading:
delay(200); // Argument is in milliseconds
} // End of function 'loop'
//====================================================================