more info on API and advanced motor control, for example:
best PWM frequency to use
what is & how to use the advanced “Channel set, set IN1-IN4 of H-bridge chip, only for advanced users”
what are all the parameters SETPWMAB, spda/b, SETFREQ, pres
It is possible to wok out most of what these do from the schematic, but this leaves missing information about what the firmware does!
I want to use the spare ATMEGA IO pins, so does anyone know where the source code and binaries for the Atmega 8 firmware are? … or a similar project by someone else that has the source available?
I had to make changes to the example code for it to compile under Arduino 1.0 GUI, will post these changes once I have finished testing.
My i2c motor driver does not work, I want to change the firmware but I have not enough information, I downloaded the .hex file but not as upload it to the board.
Can you help?
thanks
It worked fine at first but it seems that is locked, now all LEDs remain lit and does not work, I have no other i2c device to test the i2c bus, the motor driver may be blocking the bus i2c. I have to buy a grove rtc to try. I dont know if there is a way to know if the motor driver works, to make it respond messages
It worked fine at first, all connection are ok. I am using a shield with an arduino and the i2c Motor Driver. I tried the code of the link but it does not work, Motor Driver keep all the LEDs on.
I would like to send something to the Motor Driver and this reply through i2c but i am not sure if it is possible.
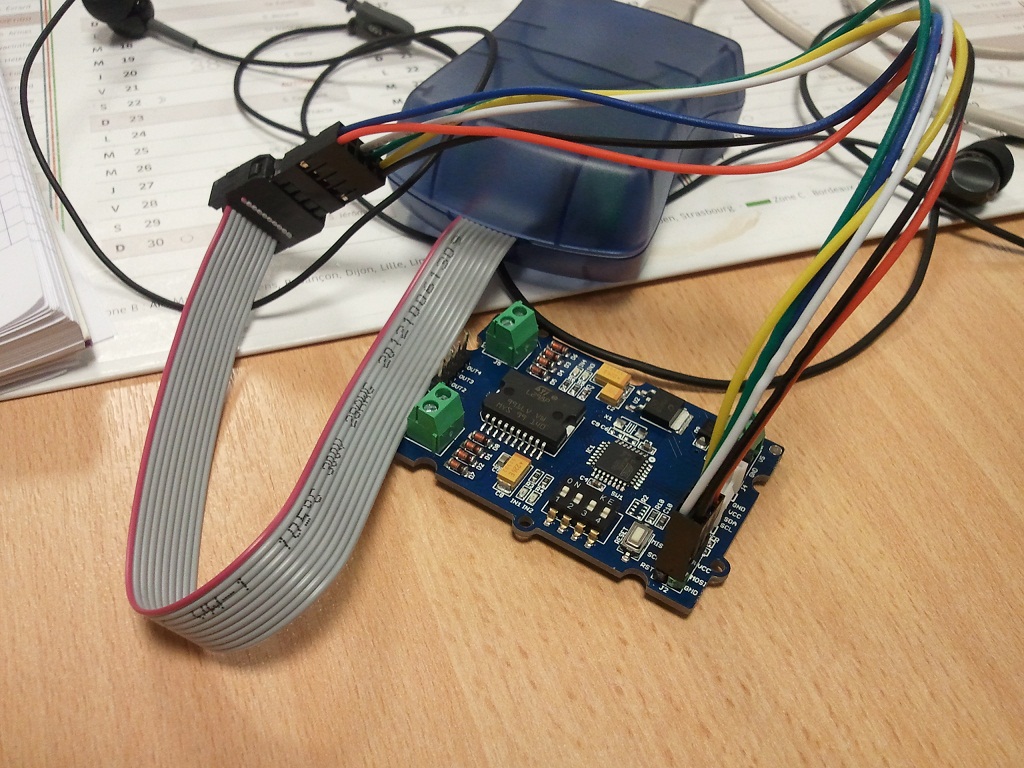
I’m trying to flash the frimware of my I2C motor driver but I’m struggling with the AVR programmer. I bought the AVRISP programmer from seeedstudio.
Please see enclosed a picture which shows how I connect to the board.
A had the similar problem. It was wrong pinout written at the board. But my board looks quite different (may be I have an old version of it).
Try to look at atmega8 datasheet, and check wheather the MISO, MOSI and SCK pins of controller connected to the proper pins of the socket.
So is the actual SOURCE CODE of the firmware somewhere online? The wiki link File:Grove-I2C Motor Driver firmware.zip seems to only have a file with hex values in it, no source code.
I want to know if I can extend the firmware so it can work with dc motors with encoders.