Hi, I have some problems when using the Grove - Haptic motor controlled with M5Stack Core2.
To be detailed, a single Grove - Haptic motor is plugged into the ’ Grove - 8 Channel I2C Multiplexer/I2C Hub (TCA9548A)’ and the hub is connected to the M5Stack Core2 controller.
The problem is that:
1, the 'Grove - Haptic motor ’ gets hot after 5 minutes of actuation. (the power source is 5V, which does not exceed)
2, the vibrator does not vibrate properly, it can only generate a week and short vibration.
the code is here
/*
*******************************************************************************
Copyright (c) 2021 by M5Stack
Equipped with M5Core2 sample source code
Visit the website for more information:https://docs.m5stack.com/en/core/core2
获取更多资料请访问:https://docs.m5stack.com/zh_CN/core/core2
describe:I2C Scanner. I2C探测
date:2021/7/26
*******************************************************************************
*/
/*
This program scans the addresses 1-127 continuosly and shows the devices found on the TFT.
*/
/* ref: https://wiki.seeedstudio.com/Grove-Haptic_Motor/ */
/* test with the grove hatpic motor
issues:
1, the operation on the haptic module make it get hot
2, the vibrator gets hot and does not work properly with/without the hatic hub
reasons?
1, not because of the power
2, probably because of the IIC communication from M5Stack
*/
#include <M5Core2.h>
//#include <Wire.h>
//#include <U8glib.h>
#include <drv2605.h> // for vibration
#define MUX_Address 0x70 // TCA9548A Encoders address
#define DELYVIBRATOR 2000
DRV2605 haptic;
void setup()
{
M5.begin(true, true, true, true); //Init M5Core2(Initialization of external I2C is also included).
//Wire.begin(21, 22); //Detect internal I2C, if this sentence is not added, it will detect external I2C.
/* init the 8 channel (0~7) on the TCA chip */
for (int i = 0; i < 7; i++)
{
tcaselect(i);
//if (haptic.init(false, true) != 0) Serial.println("init failed!");
//if (haptic.drv2605_AutoCal() != 0) Serial.println("auto calibration failed!");
// but there is still arror from the serial print,
// error says 'init failed!' and 'auto calibration failed!'
// reason: the errors come from the port 4~7, bcz il y a no device connected.
}
delay(1000);
}
int textColor = YELLOW;
void loop()
{
// make the vibration
tcaselect(1);
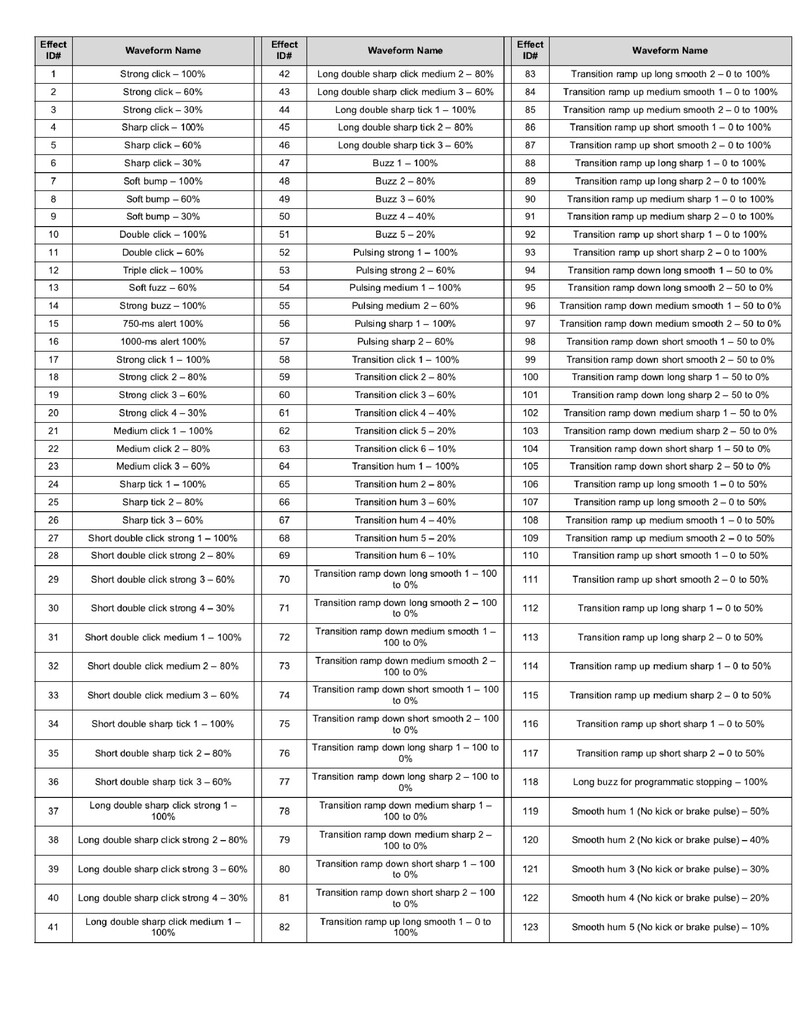
for (int i = 0; i<123; i++)
{
setVibrator(1, i);
}
//haptic.drv2605_Play_Waveform(118);
delay(1000);
}
void tcaselect(uint8_t i2c_bus)
{
if (i2c_bus > 7) return;
Wire.beginTransmission(MUX_Address);
Wire.write(1 << i2c_bus);
Wire.endTransmission();
}
/* actuate the vibrator on 'channelx' with 'effectnox' */
void setVibrator(int channel, int effect)
{
/* channel: 0~7, effect:1~124 */
tcaselect(channel);
Serial.print("Effect No: ");
Serial.println(effect);
haptic.drv2605_Play_Waveform(effect);
delay(DELYVIBRATOR);
}
the code is programme with Arduino IDE on Ubuntu20.4, the detail of the controller is here:’ M5Stack - Modular Rapid ESP32 IoT Development Board - ESP32 dev kits– m5stack-store’
anyone has clue about this?
thank you in advance!