Hi,
I am trying the arduino sample code at below link:
I would like to under what’s the meaning of begin_code, state_code, gear_code, delay_code, and check_code. Do you have the datasheet to explain the protocol of data output?
Also, can this senor output the distance info? Or how can we calculate the moving object distance?
Hi Baozhu,
Thanks your reply. Finally, I found the pdf file from ur link. I have few questions as below:
To adjust the sensing distance, we need to change the register value or by SDK? May I have the SDK sample code or registry map?
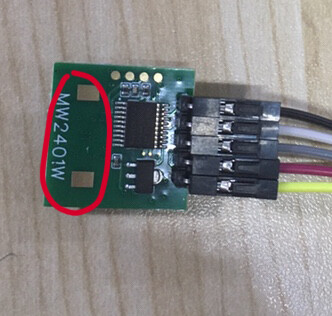
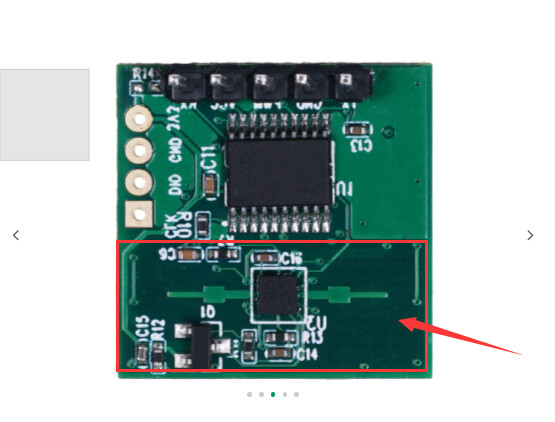
From the pdf, it mentioned the antenna should be oriented towards the target sensing area. May I know where is the antenna in below image? Is it the red circle area? By the way, my sensor looks slightly different from your reference image.
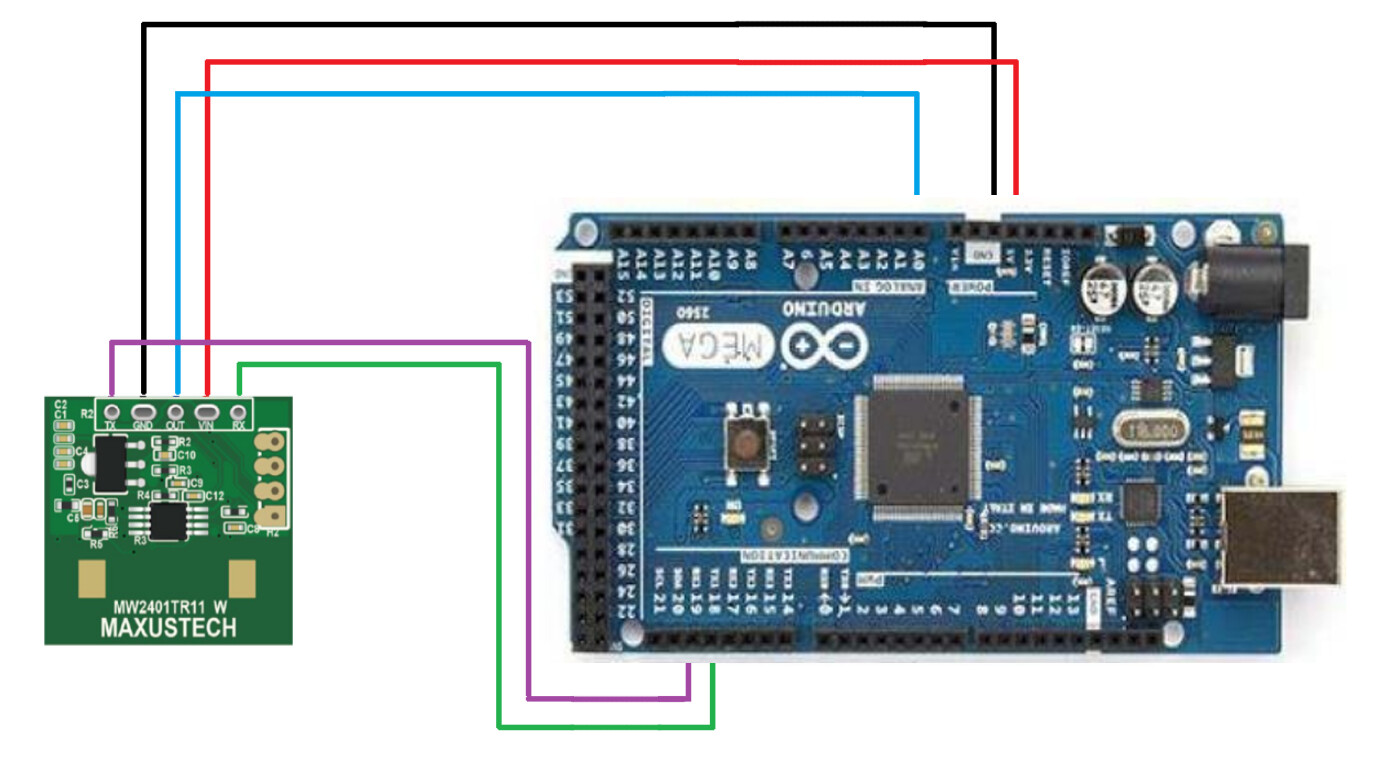
The output pin (0 ~ 3.3V) is connected to analog pin 0 (0~ 5v) in arduino. Do we need to map the analog value from 3.3 v to 5v in the sketch in order to get the correct readings?
I am confused with the relationship between OUT value and serial data.
Does it mean that we can see the movement from analog waveform, at the same time, we can also capture the same movement info from TX/RX?
Hi @elisasylee
Sorry for the SDK isn’t open-source, Only have the MW2401 serial port HEX communication protocol.
It can be controlled by the serial port tool plus the above command.
The antenna is in the below picture part. There is no need to map the analog value from 3.3 v to 5v in the sketch. Out value is an analog value and is print to the serial monitor. Yes, all the begin_code,state_code,gear_code,delay_code value are obtain through RX/TX.
Hi Jiacheng,
Thanks your reply. From the protocol document, it stated how to adjust the sensitivity (jog gear code). How about the sensing distance? I couldn’t find it.
Also, what is the OUT value represents? Frequency speed? Spectral data?
Hi. I have just tried one of these. I think it is a “doppler” module which should just output a high (3.3V) signal with motion, and 0 without. The serial value should tell the direction or motion, there is no distance info. I cannot get any response to motion, it just gives a 3.3V output all the time and gear value 175 or stationary. Anyone else get it to respond to motion? The Seeed video seems to be another unit than what I just purchased. The default gear seems to be 3; can you change this by a serial write in case its in saturation?