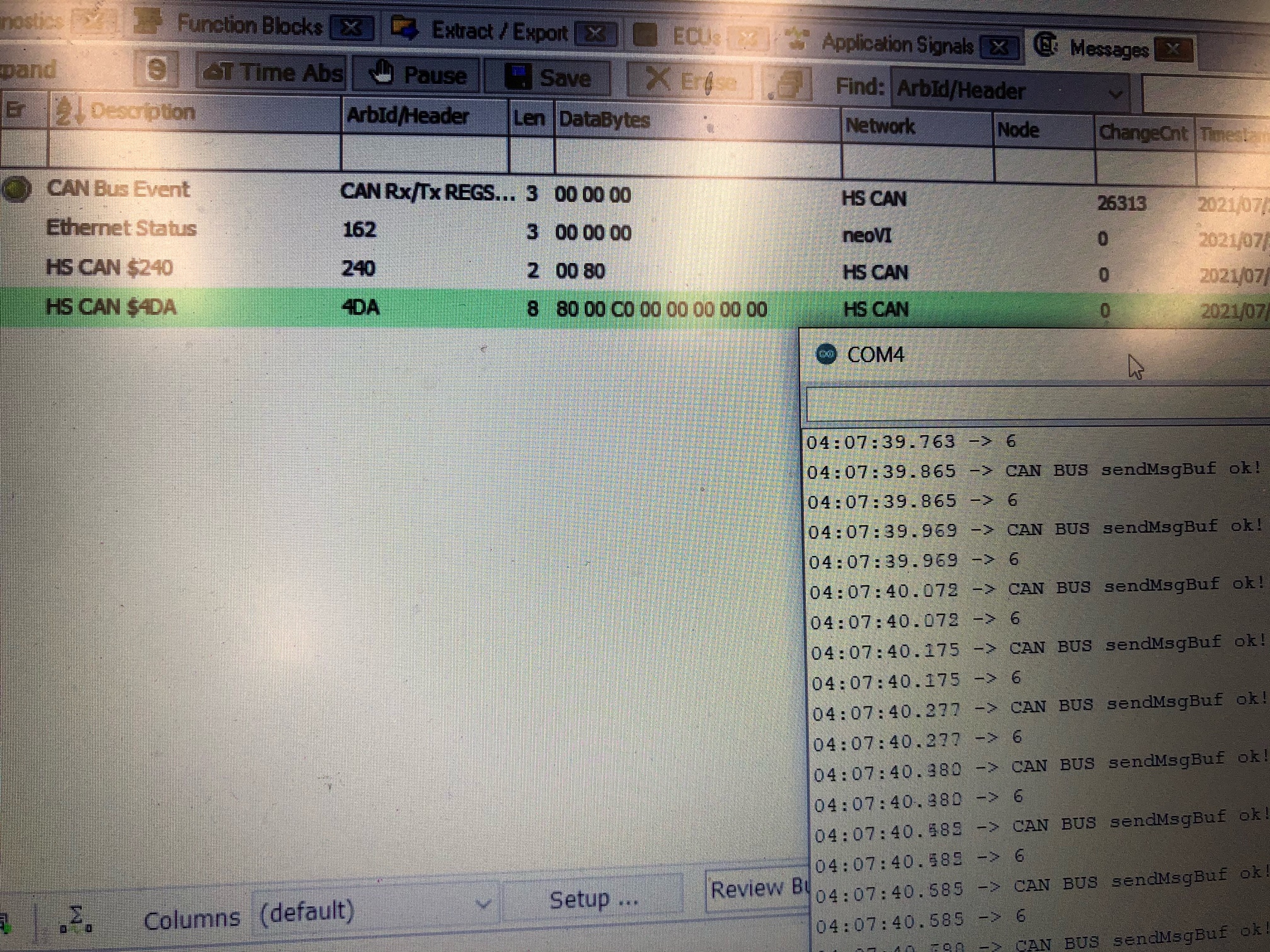
Can anyone give me any tips? I cant seem to understand why with the example Send code I cant see any new messages on the CAN bus… Ive modified the code slightly below. Any ideas?!!
Im using a can bus shield that i purchased Amazon.com
// demo: CAN-BUS Shield, send data
// [email protected]
#include <SPI.h>
#define CAN_2515
// #define CAN_2518FD
// Set SPI CS Pin according to your hardware
#if defined(SEEED_WIO_TERMINAL) && defined(CAN_2518FD)
// For Wio Terminal w/ MCP2518FD RPi Hat:
// Channel 0 SPI_CS Pin: BCM 8
// Channel 1 SPI_CS Pin: BCM 7
// Interupt Pin: BCM25
const int SPI_CS_PIN = BCM8;
const int CAN_INT_PIN = BCM25;
#else
// For Arduino MCP2515 Hat:
// the cs pin of the version after v1.1 is default to D9
// v0.9b and v1.0 is default D10
const int SPI_CS_PIN = 10;
const int CAN_INT_PIN = 2;
#endif
#ifdef CAN_2518FD
#include “mcp2518fd_can.h”
mcp2518fd CAN(SPI_CS_PIN); // Set CS pin
#endif
#ifdef CAN_2515
#include “mcp2515_can.h”
mcp2515_can CAN(SPI_CS_PIN); // Set CS pin
#endif
int status = 0;
void setup() {
SERIAL_PORT_MONITOR.begin(115200);
while(!Serial){};
while (CAN_OK != CAN.begin(CAN_500KBPS)) { // init can bus : baudrate = 500k
SERIAL_PORT_MONITOR.println("CAN init fail, retry...");
delay(100);
}
SERIAL_PORT_MONITOR.println("CAN init ok!");
}
byte stmp[8] = {0x03, 0xE8, 0x00, 0x00, 0x00, 0x07, 0x68, 0x00};
void loop() {
// send data: id = 0x00, standrad frame, data len = 8, stmp: data buf
stmp[7] = stmp[7] + 1;
if (stmp[7] == 100) {
stmp[7] = 0;
stmp[6] = stmp[6] + 1;
if (stmp[6] == 100) {
stmp[6] = 0;
stmp[5] = stmp[5] + 1;
}
}
status = CAN.sendMsgBuf(0xC9, 0, 8, stmp);
delay(100); // send data per 100ms
SERIAL_PORT_MONITOR.println("CAN BUS sendMsgBuf ok!");
SERIAL_PORT_MONITOR.println(status);
}
// END FILE