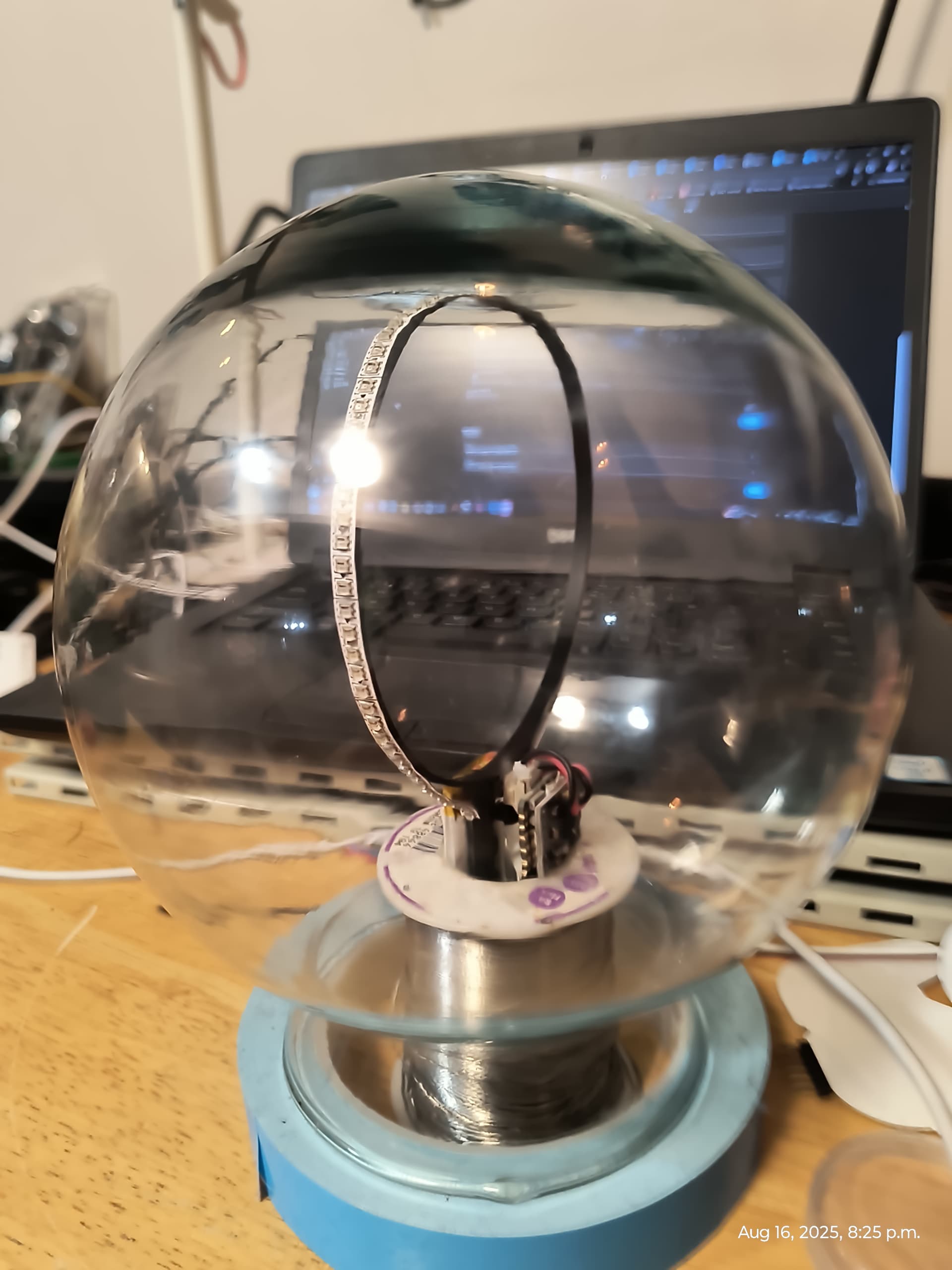
I had a fishbowl that needed a project, so I’m going to try and turn it into a persistence of vision display.
I have an NRF 54L15 sense attached to an n20 motor, with a tiny h bridge breakout soldered directly on the back of the Xiao module.
I added a battery connector and a little lipo battery. the 3D print for the LED holder is on the third iteration.
So

At this point I have the motor controller working, bluetooth control over the motor controller, and I can read data from the IMU. but it turns out there is no working WS2812 driver for the NRF54l15, so I’m undertaking an effort to create one using the shiny new High performance framework and the NRF54l15’s FLPR fast lightweight peripheral core.
This will allow me to use inline assembly on the riscv co-processor to run ws2812 chains with little to no impact on the main core’s workload. Akin to how the pi pico can use it’s PIO engine to drive a ton of ws2812 without breaking a sweat.
I’m posting my progress on the driver in this fork of the NRF SDK
but it’s not ready to build yet, as I’m still working through learning how devicetree and some other NRF subtleties work.