Default Arduino UNO I2C frequency (100Khz) is not the problem: the loop time is 0.8 ms with the improved library (without delay(4) see in previous post).
The problem is the PWM frequency on the motor output: it is 490 Hz(2ms) on Arduino UNO+Arduino motor shield and 25Hz (40ms) on Grove Motor driver V1.3
The STM32 microcontroler on the grove motor driver generate the 25Hz PWM frequency.
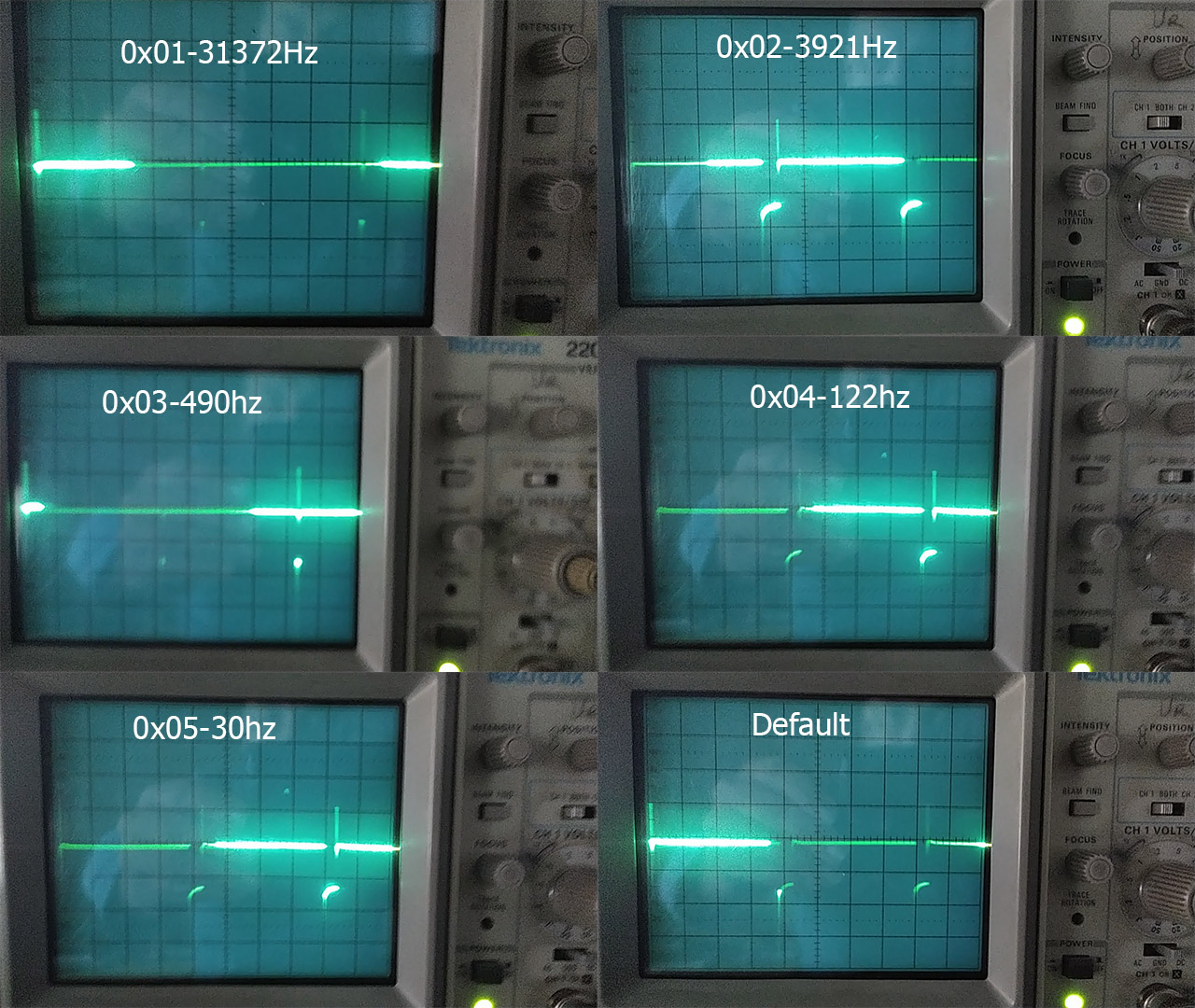
motor.frequence (in the library) should change the pwm frequency but it changes only slighly the pwm ratio. See the oscilloscope capture: