I’m hoping to use the Grove water sensor to measure how the water in my tank rises and falls. But I’m not getting consistent results, especially if I immerse the entire sensor. Am I using it correctly?
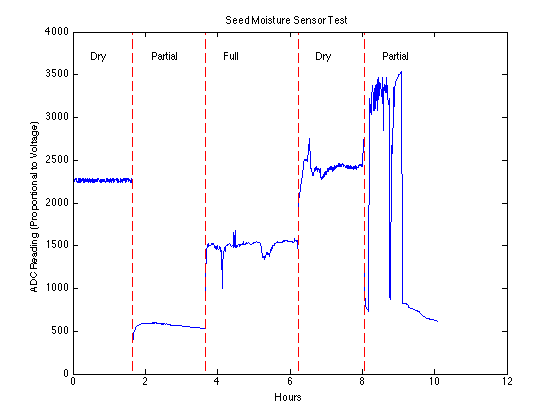
The plot below shows the results of a simple test I performed today using a Spark Core to measure the water sensor’s output. I’m using 3.3V (filtered) as Vcc, and putting the signal directly into an analog input of the Spark Core (no buffering, or pullups/pulldowns.) For testing purposes I’m using tap water in a glass next to my desk.
It works great if I just immerse the tip (tree traces) of the sensor. But I get wildly inaccurate results when I immerse the entire sensor. That’s unfortunate, since in my application the water level will go well above (and below) the sensor.
Is there something I should be doing differently?
Any ideas? Or how to get a better signal?
Thanks.
— Malcolm